
整车simulink建模
前言
整车建模的工作是建立在前文若干整车数学模型的基础上的,只要理论没有问题,建模不算太难。建模方式有很多,在Simulink中可以直接用Matlab Function写公式,也可以使用Simulink基础模块一步一步搭建公式。前者更加直观,并且时间成本更低,因此本节大多采用该方式建模。
本节建模的工作思路为:首先根据理论搭建模型,其次引入CarSim模块作为对比,再次设计工况初步验证,最后编辑matlab脚本进行批量仿真,完成多工况的全面验证。按照该思路,本节完成了
一、2自由度线性动力学模型-操纵
1.1 快速建模
在Simulink中建立如下模型:
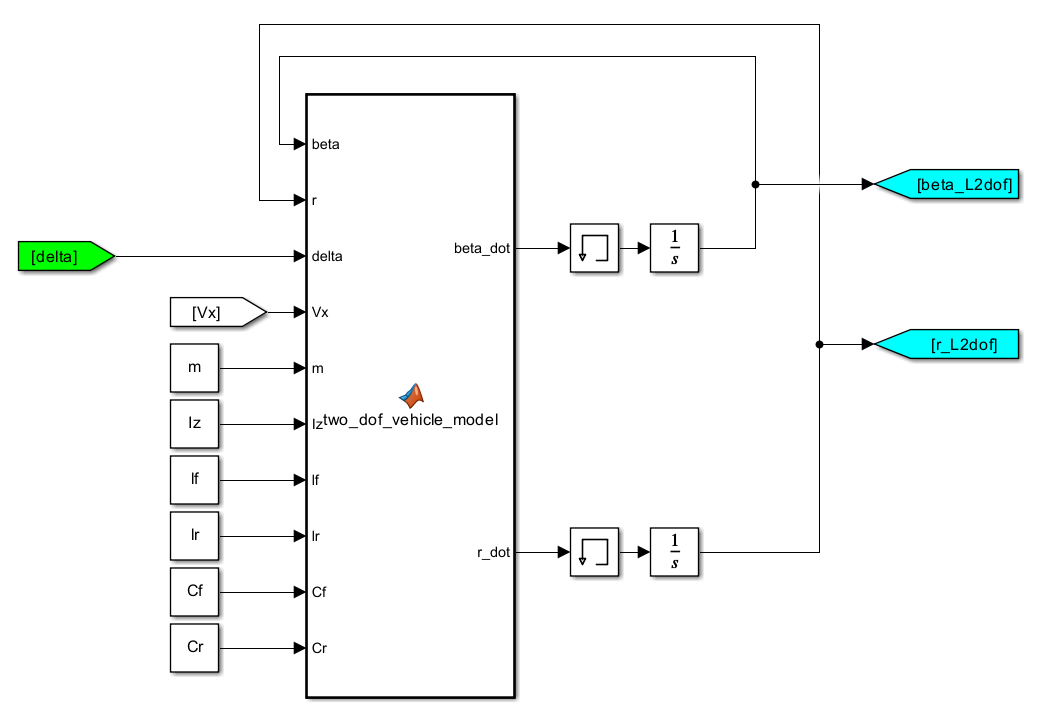
其中,绿色为模型输入,RGB为 #00FFFF 的两个模块为模型输出,同时也是系统状态量。
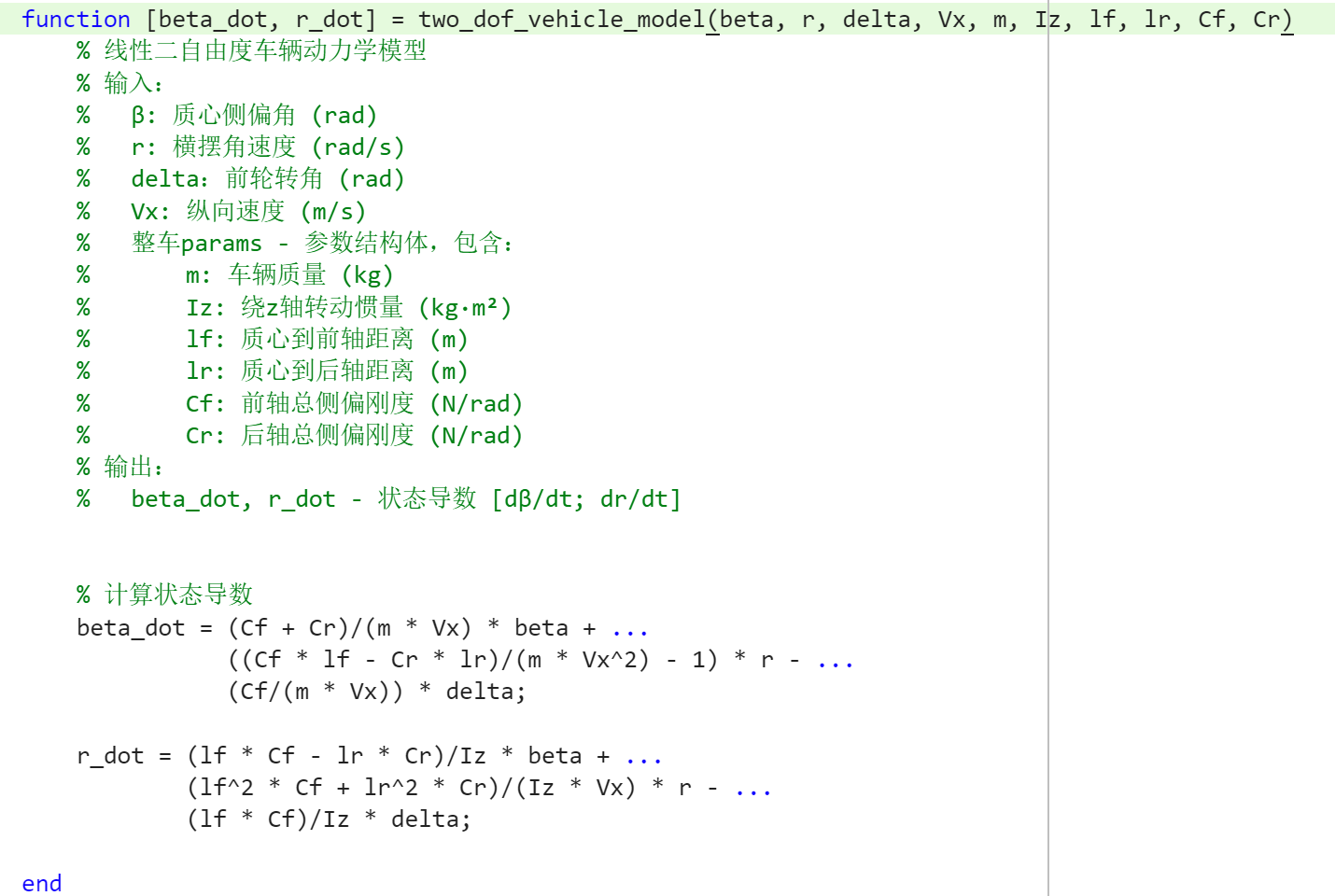
Matlab Function中的代码为:
1.2 CarSim 多工况对比
首先保持Simulink模型与CarSim模型在结构参数上的一致,即整车质量、惯量、前后轴距等等需要统一。
其次在CarSim中设置双移线工况,输出车轮转角,将该车轮转角输入到Simulink模型中,保持二者的输入量一致,虽然有一定瑕疵,但是由于模型只有这一个输入,该输入的差异不会引起其他输入的耦合变化,导致模型发散,因此在快速复现中仍有一定的价值。
最后编写批量仿真脚本,即可得到模型验证结果:
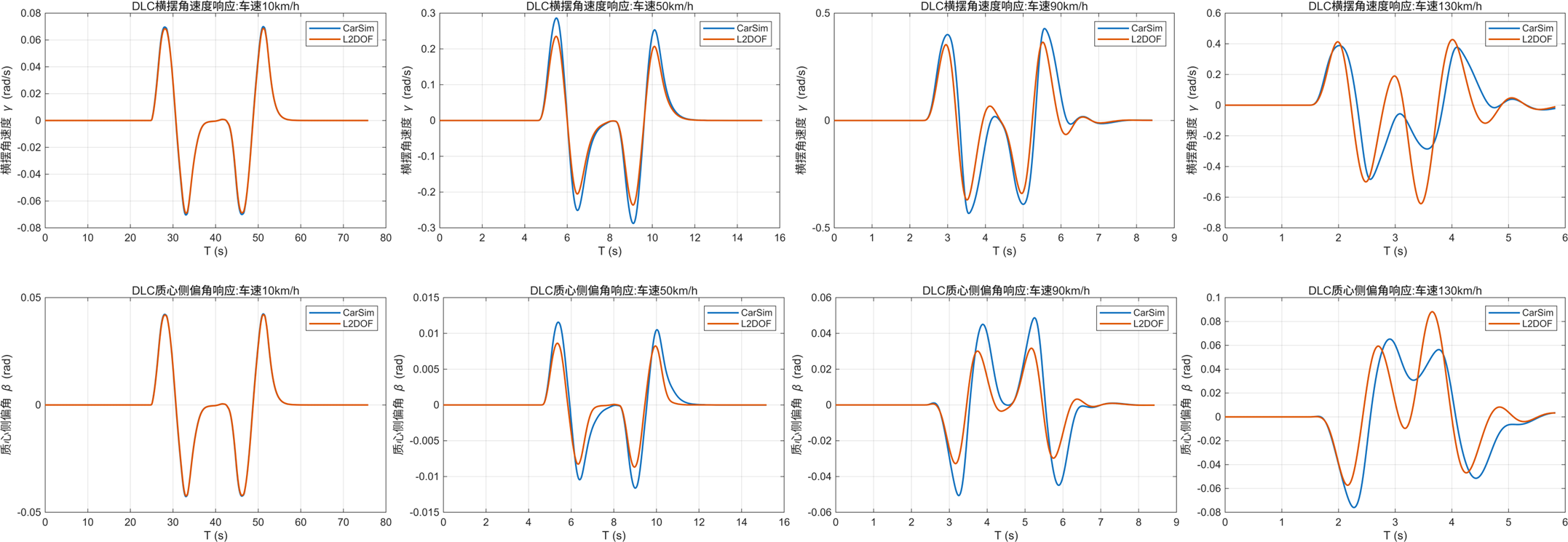
由图可知,该模型在低速时具有十分优异的性能,能够准确的描述车辆的质心侧偏角与横摆角速度在双移线工况下的响应,与高阶模型即CarSim模型的差异较小。但是随着速度增加,其误差逐渐变大,在车速为90kmph的双移线工况下的误差较大。这是因为在高速转向变道时,由于车辆在更短的时间内从0侧向初速度完成横向运动,因此需要地面提供较大侧向力,较大的侧向力对应较大的轮胎侧偏角,当速度超过一定界限,轮胎将已处于非线性区域,此时轮胎力线性化假设已不成立,因此线性二自由度动力学模型在高速变道时效果较差。