
转向系统概述
A. 转向系统发展历程
汽车转向系统主要经历了三个发展阶段,分别为:无助力转向、助力转向、线控转向 。最早一代的汽车并没有配备助力转向装置,转向盘至车轮之间只有一条独立的动力传递链,巨大的转向阻力完全由驾驶员克服,驾驶员操纵困难、体力消耗大。为解决这一问题,1953年美国通用汽车公司率先使用液压助力转向系统(Hydraulic Power Steering System, HPS),将一部分转向阻力加载到液压系统上,减轻了驾驶员的转向阻力矩。随后为解决普通液压助力系统体积过大、能耗过高以及控制效果不佳等问题,工程师们先后提出了电控液压助力转向系统( Electro-Hydraulic Power Steering, EHPS)以及电动助力转向系统(Electric Power Steering System, EPS)。目前绝大部分汽车,即小型四轮乘用车都配备有EPS转向系统,只有少部分如农业机械、大型工程车等仍在使用EHPS。
SBW的转向功能由转向电机实现,因此装载SBW的汽车能够由智能驾驶系统直接控制车辆转向。随着汽车智能技术的发展,在自动驾驶以及无人驾驶等发展趋势下,汽车主动转向功能已成为未来高级别智能驾驶汽车的基础,因此线控转向系统被认为是实现高级别自动驾驶的关键部件之一。目前汽车转向系统也逐渐由现在广泛应用的助力转向朝着线控转向的方向发展。虽然目前有不少相关研究与应用,使用EPS实现车辆的主动转向功能,但是由于EPS相较于SBW具有结构复杂、成本高、控制力矩小转速慢等缺点,因此SBW具有更高的发展潜力,SBW的关键技术也成为了目前研究的焦点。
综上所述,汽车的转向系统经历了无助力机械转向、液压助力转向、电控液压助力转向、电动助力转向的多种转向方式,并正在逐步开展线控转向的落地应用工作。目前已有不少乘用车型应用线控转向甚至后轮转向技术,但是大规模的线控转向应用仍然需要一定的时间。总的来说,目前在小型客车上仍然是以电动助力转向为主流,而中大型货车则是由于较大的转向助力需求而采用了HPS, EHPS等助力系统,不过有些 高等级自动驾驶重卡会采用SbW + 冗余转向的转向系统。
one more thing: 目前,不少学者正在研究分布式角模块底盘,该底盘架构的每一个角模块集成了分布式驱动、线控制动、线控转向以及主动悬架的功能。该架构重构了汽车转向模式,具有较高研究与应用价值。
B. 转向系统结构
虽然汽车转向系统种类较多,但是大多都是在普通机械转向系统的基础上改造而来的。由于本文只研究小型客车,并且小型客车旁边使用EPS、SbW的转向系统方案,因此本节仅介绍这两种转向系统的结构。
电动助力转向EPS,可以分为转向管柱式Column-EPS、小齿轮式Pinion-EPS、齿轮齿条式Rack-EPS。如下图所示:
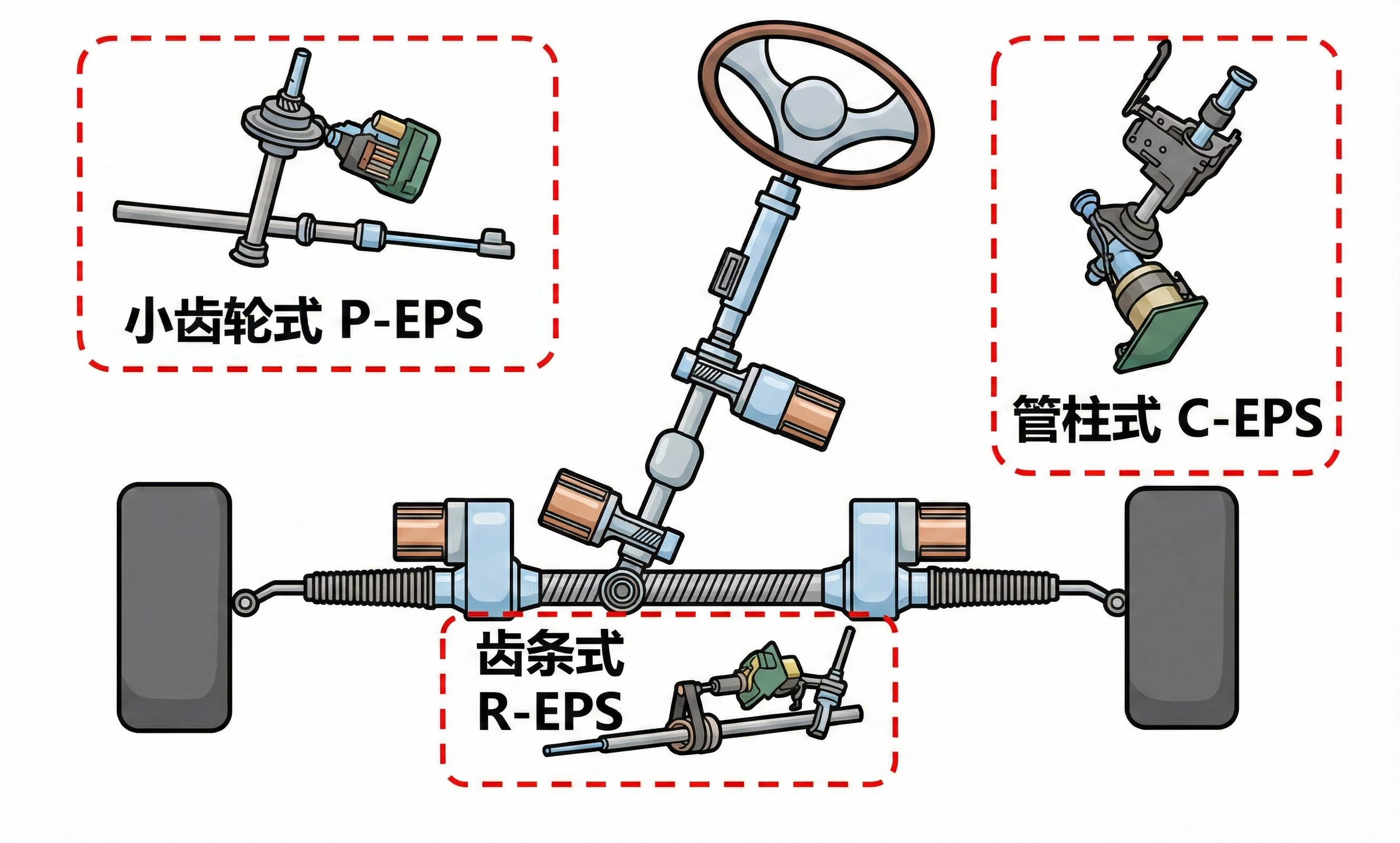
一言以蔽之,电动助力转向就是在机械转向的基础上引入助力电机以及减速器,通过减速器将助力电机输出的助力力矩输出到转向系统中,辅助驾驶员转向,减轻驾驶员操作力矩,提升转向轻便性。
C. 线控转向系统结构
线控转向源自飞机的控制技术,由于飞机操作室与机翼距离较远,无法使用机械连接完成驾驶员控制输入的传递,因此采用电信号取代机械连接。线控转向系统同样取消了转向盘至车轮之间的机械连接,减少了十字轴、万向节等传动部件,使转向系统结构更加简单,布置灵活,可以在同一款车型上较为简单地完成左右舵的设计,并且实现了汽车轻量化。
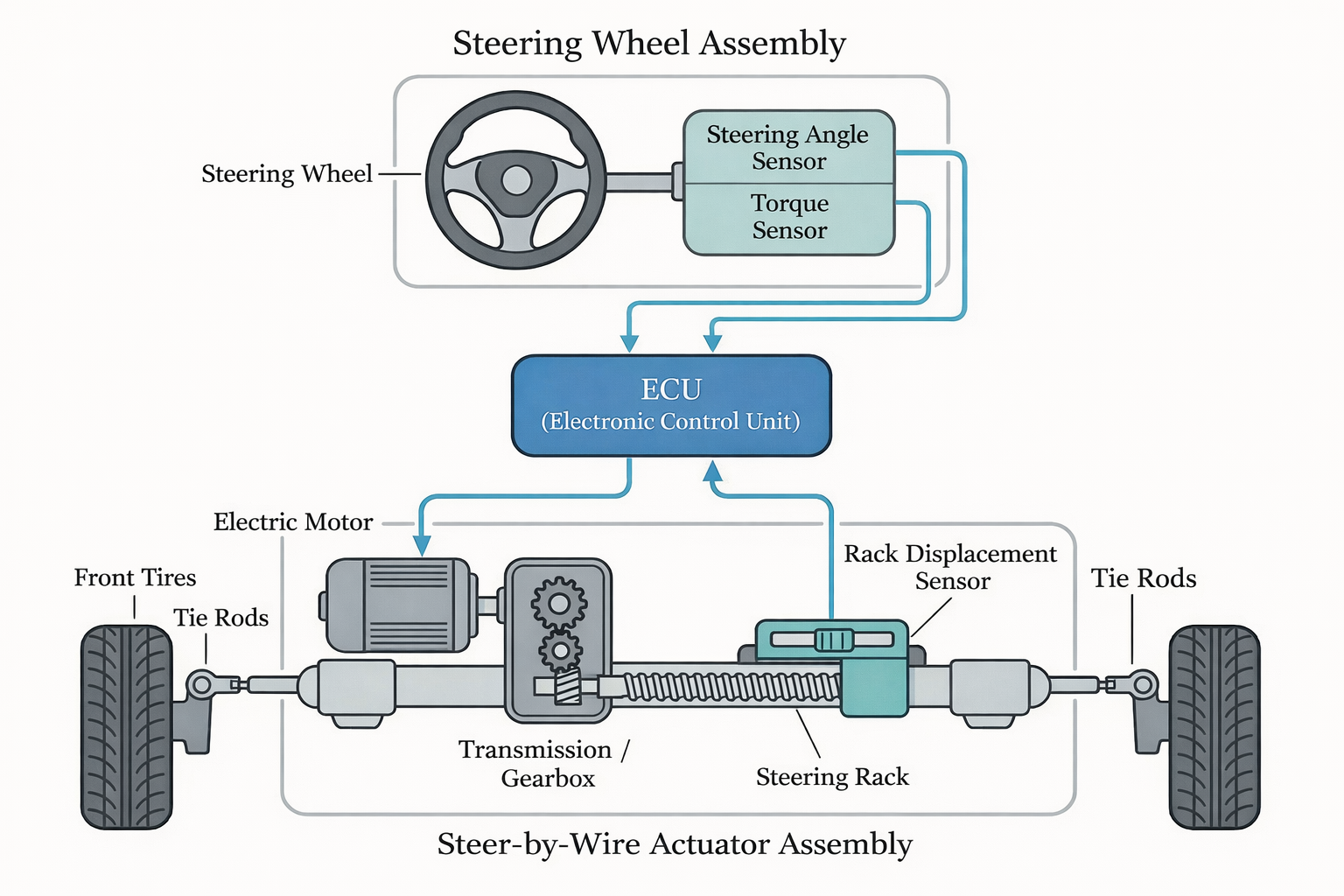
如上图所示,线控转向系统的结构可按照所实现的功能分为三个模块:转向盘总成、车载控制单元、转向执行总成。
转向盘总成由转向盘、转角传感器、转矩传感器、减速器、路感控制电机组成;车载控制单元由电子控制单元(Electronic Control Unit, ECU)以及传输总线组成;转向执行总成主要由执行电机、减速器、转向器、转向拉杆、转向节以及车轮组成。
在人工驾驶的场景下,驾驶员操纵转向盘,转角传感器获取转向盘转角,得到驾驶员的操作意图并输入车载控制单元模块中;ECU通过工程师预先设计的控制策略,结合车辆状态,计算出期望车轮或转向电机转角输入到转向执行总成中;转向执行电机控制器根据期望转角,结合转向电机状态,计算出驱动力矩以及所需的驱动电流,控制转向执行电机驱动车轮转动。为实现路感反馈,以还原驾驶员对车轮与路面之间相互作用的感受,ECU还会估计转向执行总成的齿条力或轮胎力,并结合车辆横摆角速度等状态,控制路感电机产生阻力矩,模拟转向阻力或者路面激励,并通过转向盘作用于驾驶员的双手。
在自动驾驶场景下,车轮期望转角由无人驾驶系统的车辆运动控制器根据规划路径和车辆位置、状态参数计算得出,并由转向执行总成根据转角跟踪控制算法完成车轮转向驱动。而转向盘总成则停止工作,或者通过路感控制电机同步车轮转动,并随时接受驾驶员的介入。
D. 线控转向系统关键技术
(1)路感控制技术。在汽车转向过程中,路感是驾驶员通过转向盘感受到的路面与轮胎之间相互作用产生的转向阻力矩。由于SBW取消了转向盘与车轮之间的机械连接,驾驶员不能直接感受到转向阻力,因此需要获取转向阻力并利用路感电机将其反馈到转向盘上,该过程包括期望路感的获取以及路感电机力矩控制两个层面。目前路感获取主要有3种方法,分别是传感器测量法、经验设计法、模型估计法。
(2)变角传动比技术。由于SBW技术解除了转向盘与车轮之间的物理解耦,二者之间的传动比设计变得更为灵活。相较于机械变角传动比设计,例如上世纪日本本田的变齿比齿条技术,在设计完成后传动比只是转向盘转角的函数,无法做到全工况覆盖。线控转向技术则可以根据车辆状态、驾驶员驾驶意图等多源、多层级的信息进行融合处理,计算出最佳传动比,保障高速稳定性以及低速灵活性。并且还可以通过软件升级实现控制效果优化而无需进行硬件拆装更换。
(3)稳定性控制。在线控转向汽车中,由于车辆物理参数时变、车辆模型不精确、车辆状态复杂多变以及外部干扰难以测量等因素,控制车辆稳定性的算法往往需要具备高鲁棒性、高控制精度、高响应速度、强自适应能力,并且由于ECU计算能力的限制,控制算法的计算量不能太大,防止控制系统控制延迟致使车辆失稳。目前主流的控制算法有:基于滑模变结构的自适应滑模控制、快速终端滑模控制,基于智能控制的神经网络控制、模型预测控制。此外,SBW还可以与其他线控底盘模块协同控制车辆稳定性,例如主动转向与线控驱动制动的直接横摆力矩控制协同,主动转向与悬架集成控制等。
(4)转角跟踪控制。作为直接执行车辆转向命令的模块,转向执行电机的控制算法需要解决转向系统传动件质量、阻尼、摩擦力等参数不确定与时变、传动时滞、外部扰动以及系统非线性等问题。因此需要研究抗干扰能力强的算法才能尽可能减小车轮跟踪期望转向转角的误差。
(5)故障检测与容错保障。功能安全是智能网联汽车设计的首要要求。SBW任何一个环节出现错误、故障都会造成车辆状态失稳失控,发生交通事故。因此必须对可能出现的功能失效进行检测并设计相应的保障功能。SBW的故障主要有:执行器故障、传感器故障、控制器与通讯故障。执行器故障是目前SBW故障容错的研究重点,一般设计思路为:软件检测系统状态并设计失效判定依据,冗余备份硬件保障功能正常运行。此外对于四轮独立驱动汽车,还可以在转向功能失效时,利用驱动制动器产生直接横摆力矩对转向进行补偿,但这会影响车辆的纵向动态响应。