
悬架系统概述
一、前言
笔者:终于来到悬架了,我愿意用这样一句话来作为开头——
“当我们讨论悬架的时候,我们在讨论什么”
悬架是汽车的车架(或承载式车身)与车桥或车轮之间所有传力连接装置的总称。 在物理位置上,悬架位于簧上质量与簧下质量之间,连接着车架与车桥或轮胎,其作用是传递作用在车轮和车架之间的力和扭矩,并且缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的振动,以保证汽车能够平顺行驶。悬架与车架、车桥、车轮等同属于行驶系统,而行驶系与传动系、转向系、制动系组成了汽车底盘。
二、悬架的结构与基本原理
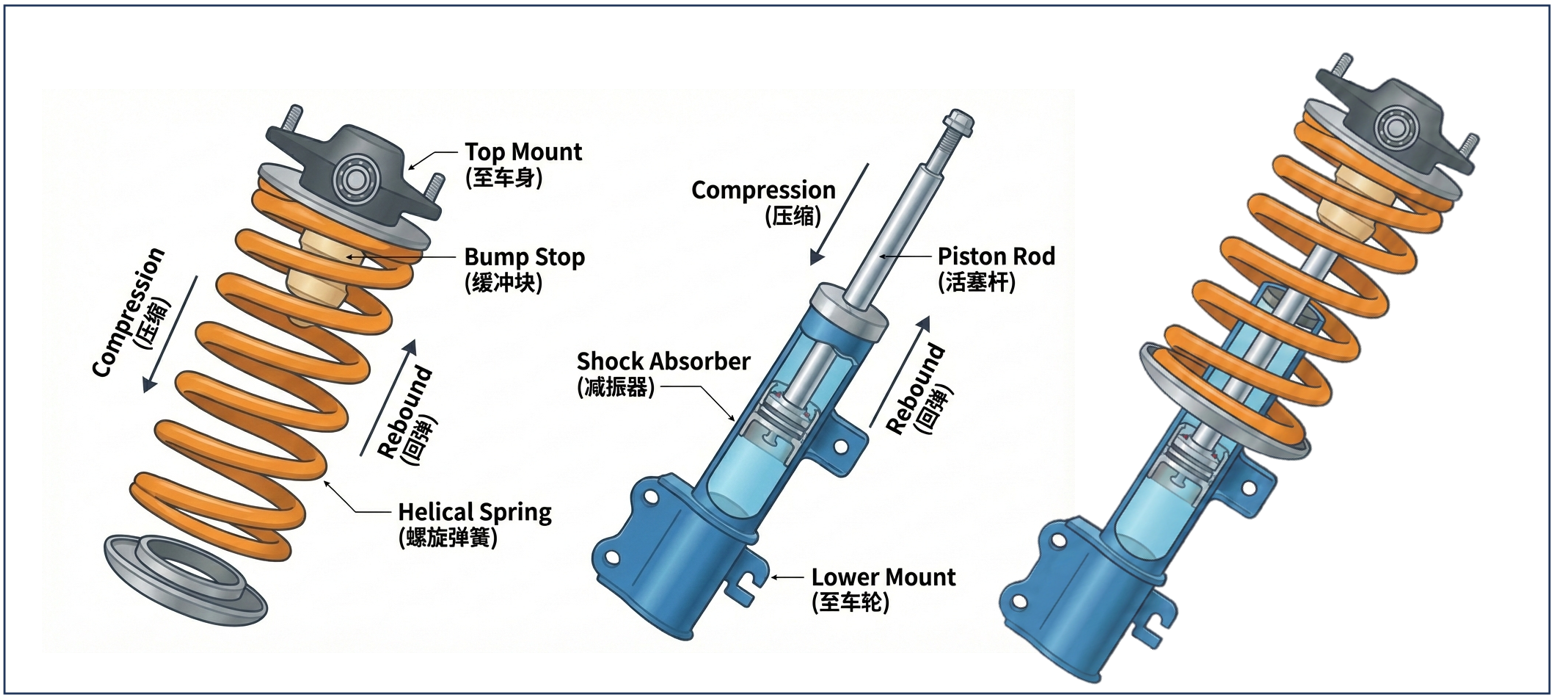
悬架的基本结构示意图如下图所示,由图可知,悬架主要由弹簧和减振器组成,并且主要位于车架与车桥之间。 弹簧提供阻碍变形的力,减振器则提供阻碍运动的力,体现在方程中则分别为,该部分在后续数学模型中再详细讨论。
车辆驶过路面不平处的悬架工作过程为:
车辆驶至路面凸起时,车轮受路面冲击迅速产生向上位移,迫使悬架系统进入压缩行程。此时,弹性元件迅速发生压缩形变,将路面输入的机械动能转化为弹性势能存储,从而有效隔离刚性冲击,缓冲传递至车身的垂向加速度。同时,减振器活塞受压运动,迫使液压油流经内部节流阀系,产生粘性阻尼力将振动能量转化为热能耗散。越过凸起后,被压缩的弹簧释放能量推动车轮复位,减振器则持续提供阻尼以抑制弹簧的反复伸缩余振。这种协同机制在过滤高频冲击的同时,迅速衰减车身波幅,确保车身姿态平稳及轮胎与地面的持续附着。
当车轮遭遇路面凹陷时,在簧下质量重力与弹簧预紧力的共同驱动下,车轮迅速向下运动以追踪路面轮廓。此过程中,弹性元件由静平衡状态转入伸展状态,释放势能推动车轮下探,极力维持轮胎接地。此时减振器进入伸张行程,通过提供较大的阻尼力精确控制弹簧的伸展速率,防止车轮因急剧下落引发机械冲击或导致车身随之过度下沉。随着车轮触底并回弹,系统再次转入压缩缓冲模式。减振器对这一伸展与回压过程的动态约束,有效平抑了车身的瞬态俯仰与起伏,在保障乘坐舒适性的同时,避免了因轮胎悬空而导致的操纵稳定性丧失。
因此,悬架的主要作用可以总结为:
- 力传递:传递车轮与车身之间的垂直、纵向及侧向反力及其力矩。
- 隔振:充当低通滤波器,衰减高频路面冲击,提升平顺性。(Ride Comfort)
此外,在车辆加减速、转向等过程中,悬架还能够控制车辆姿态,即抑制加速抬头、制动点头及转向侧倾等等。
三、悬架的分类
3.1 按执行机构分类
除弹簧与减振器外,悬架还包括防倾杆,各部件的主流形式与分类如下图所示。
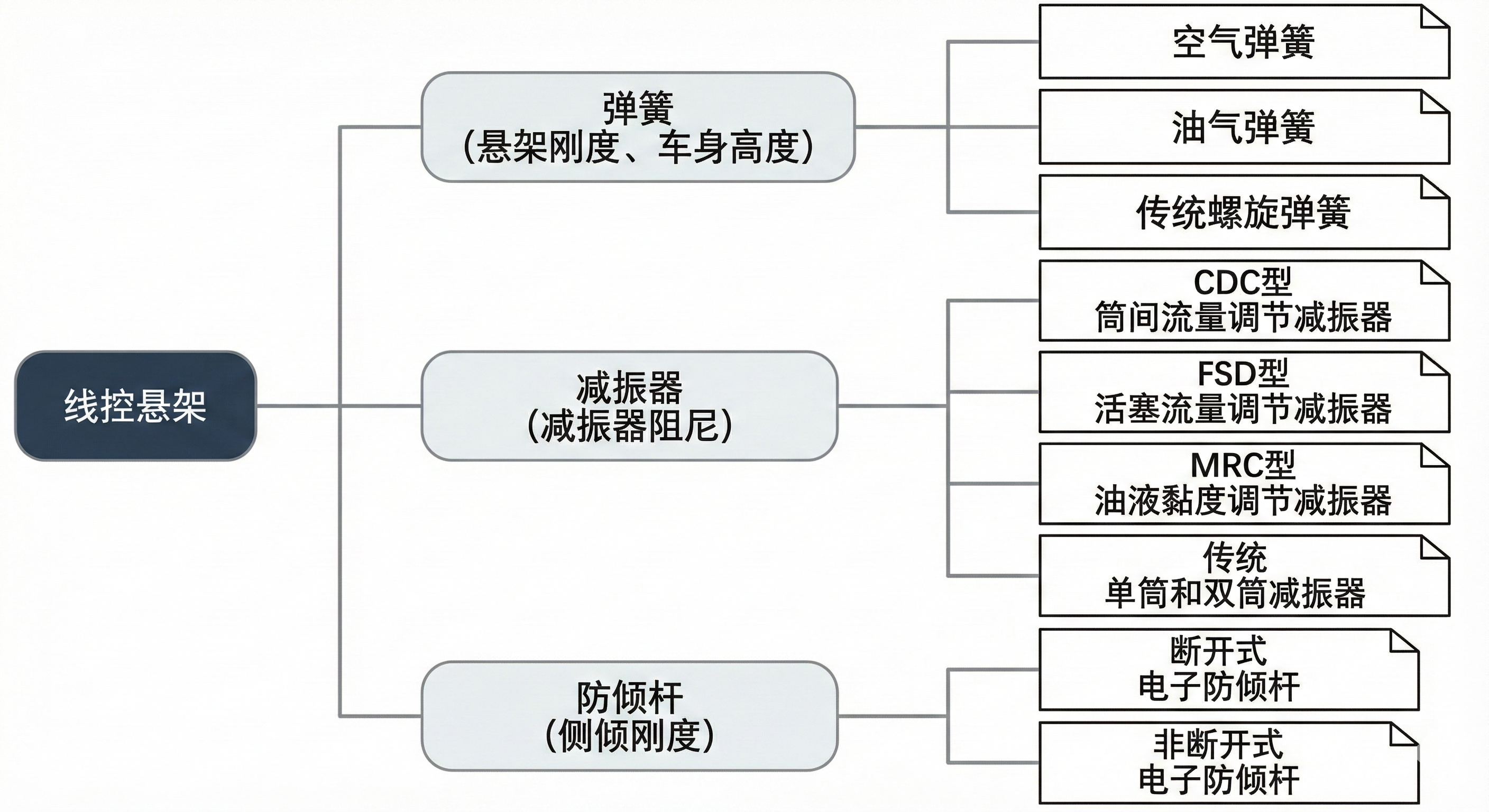
因此,可以按照不同的部件组合为不同的悬架系统,例如空气弹簧CDC减振器断开式电子防倾杆悬架。
3.2 按动力源分类
悬架的两个重要参数为刚度与阻尼,根据动力源控制参数的能力,悬架可被分为被动悬架、半主动悬架、主动悬架。其参数可控性依次上升,三种不同悬架的简化结构如下图所示。
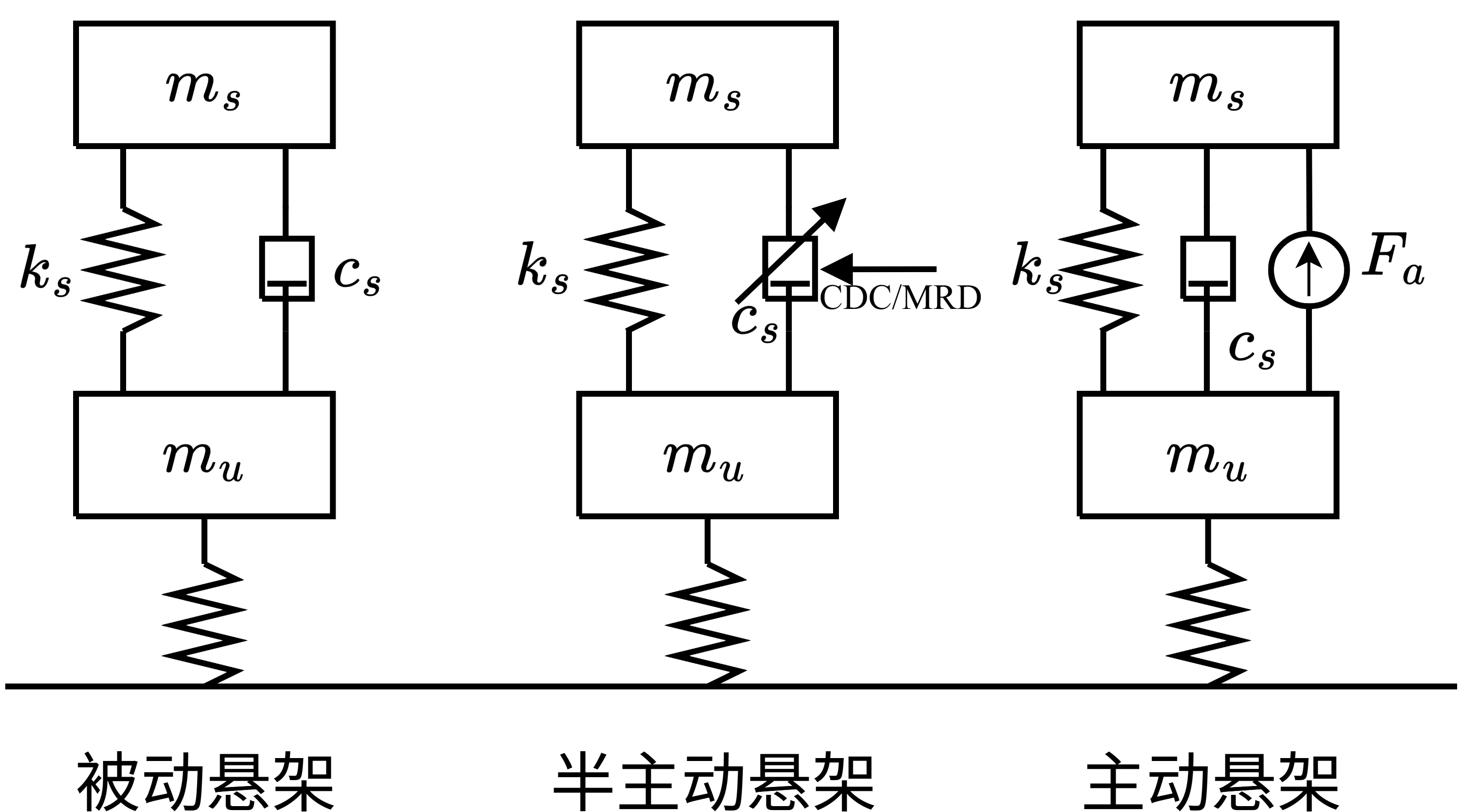
被动悬架是一种传统的悬挂系统,其刚度和阻尼完全由其自身的物理特性决定,不可动态调节。这种悬架结构简单、性能可靠、成本低,是传统中低端车型的主流配置。其缺点在于无法根据行驶工况主动调整,难以适应多种不同的工况,日常乘坐舒适性与操纵稳定性较为一般。
半主动悬架是指悬架的刚度或阻尼中的一项可调,可按照存储在微控制器内的弹簧和减振器的优化参数指令来调节弹簧的刚度或减振器的阻尼。在调节弹簧刚度方面,主流的半主动悬架为空气弹簧半主动悬架,其主要由微控制器、空气泵、储压罐、气动前后减振器和空气分配器组成,它通过改变各空气弹簧中压缩空气的压力和体积来改变汽车减振系统的软硬和车身高度。在调节减振器阻尼方面,主流的有磁流变(Magnetic Ride Control, MRC)减振器、连续阻尼控制(Continuous Damping Control, CDC)减振器。其中,MRC减振器利用电磁线圈产生的磁场作用于缸筒内的磁流变液,使其内部磁性粒子在毫秒级内瞬间排布成链状结构(由液态变为半固态),通过改变流体的剪切屈服应力来实时、精确地调节阻尼力;CDC减振器通过电控比例电磁阀实时调节液压油流通通道的开度截面积,物理上改变流体流动的液阻大小,从而实现对阻尼系数的连续、线性调整。
主动悬架是指刚度和阻尼均可调节的悬架,并且还可设置外部电机等动力源直接施加作用力。主动悬架的控制器可以根据不同的路况实时调节悬架性能从而提升车辆的平顺性与操纵性。主动悬架可以分为全有源和部分有源两种形式,前者的弹簧和减振器均有外部动力源,而后者则仅有外部动力源驱动弹簧。
3.3 按结构分类
按照悬架的结构进行分类,悬架包括独立悬架、非独立悬架,麦弗逊悬架、多连杆悬架等等。结构不是本文的重点,因此不做过多论述。
one more:智能悬架
智能悬架可被视为进阶的主动/半主动悬架。先进的智能悬架系统是底盘域与智驾域的协同工作的产品,其工作原理如下:智驾系统通过摄像头、雷达等传感器感知外界条件、识别前方路面状况,感知的结果信息输入到底盘控制系统中,内部控制器(最优控制器、规则或网络等)计算出理想的悬架状态并发送到执行器控制器,执行器控制器则根据理想状态与实际状态计算出物理控制量,如液压油通道开度等,实现目标悬架状态。