线控悬架数学模型
一、前言
主流的悬架系统的动力学模型有:1/4二自由度、1/2四自由度、整车7自由度动力学模型。被动悬架、半主动悬架、主动悬架的模型差异较小,并且一般而言,其他悬架模型可以由主动悬架模型转化得到,因此,本文将使用牛顿-欧拉法分别搭建各自由度的主动悬架模型。
此外,本文采用“模型假设-微分方程组推导-状态空间方程建立”的论述框架,并且在文末给出各模型的物理量汇总表,方便查阅。
二、1/4二自由度主动悬架动力学模型
1/4二自由度悬架动力学模型是指模型仅关注整车或底盘的1/4,并且仅含有簧载质量的垂向位移和非簧载质量的垂向位移两个自由度。因此,本模型描述单轮边的垂向动力学特性,适用于基础平顺性分析及主动控制策略的算法验证。
2.1 建模假设
- 刚体假设:将车身(簧载质量)和车轮组件(非簧载质量)视为刚体,忽略其弹性变形。
- 线性特性假设:在工作行程内,轮胎刚度、悬架弹簧刚度视为线性,被动阻尼视为线性粘性阻尼。
- 点接触假设:轮胎与路面之间为点接触,忽略轮胎包络特性。
- 垂向运动独立性:仅考虑垂向运动,忽略侧向、纵向运动及外倾角变化对垂向力的耦合影响。
2.2 微分方程组建立
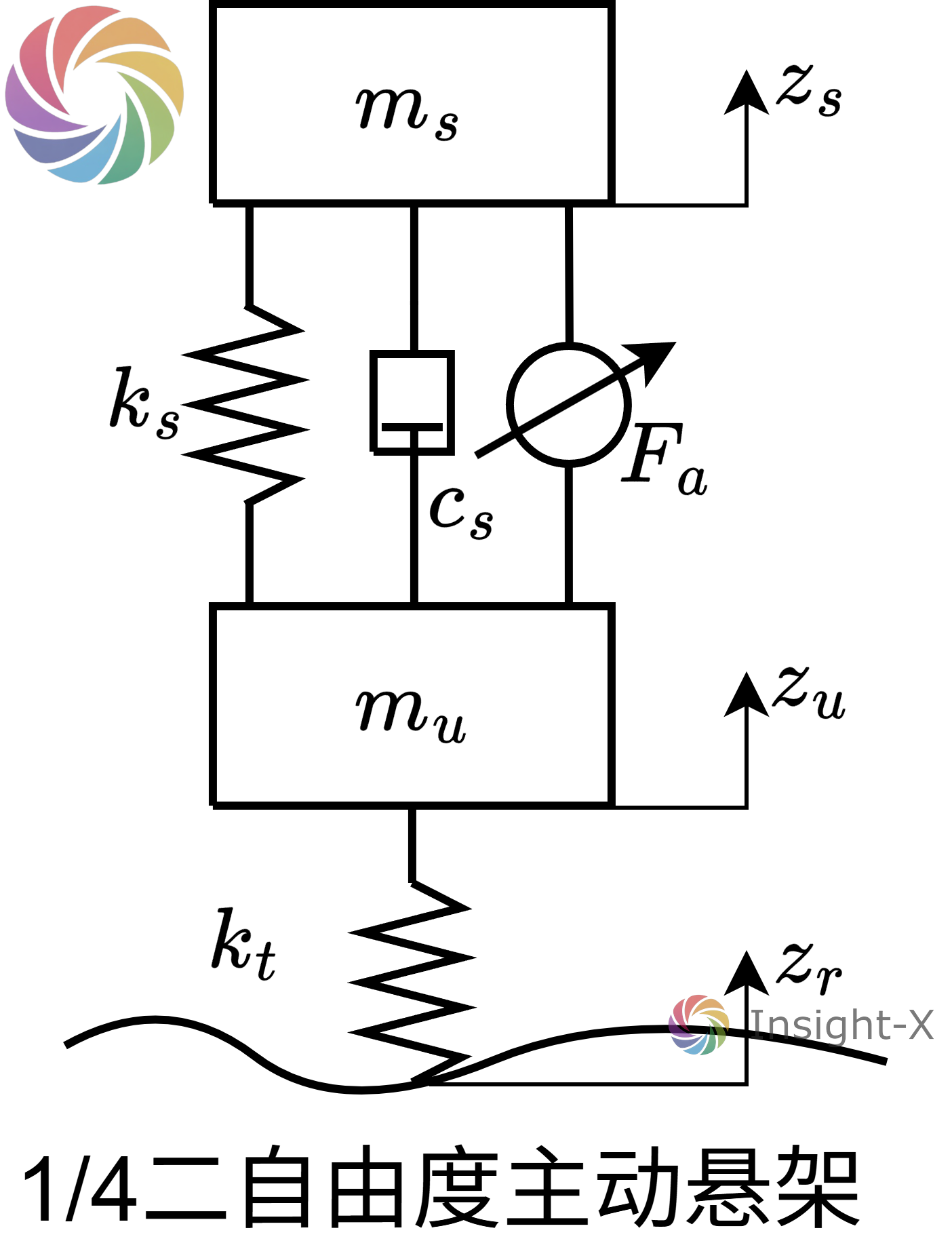
上图为1/4二自由度主动悬架的模型示意图,基于该示意图,分别对簧载质量和非簧载质量进行受力分析,可以得到簧载质量(车身)动力学平衡方程:
式中:为簧载质量;为簧载质量垂向位移;为悬架刚度;为悬架基础阻尼系数;为非簧载质量垂向位移;为主动执行器产生的控制力。
非簧载质量(车轮)动力学方程:
式中:为非簧载质量;为轮胎垂向刚度;为路面垂直激励。
2.3 状态空间方程推导
选取状态向量 ,包含悬架动行程、簧载质量速度、轮胎动形变、非簧载质量速度。
选取控制输入向量 ,路面扰动输入向量 。
输出向量 通常关注车身加速度和悬架动行程:。
推导得到状态空间方程 :
三、1/2四自由度主动悬架动力学模型
1/2四自由度悬架动力学模型为左右对称模型,描述了车辆在路面激励不一致或加减速工况下的俯仰和垂向耦合运动。
3.1 建模假设
- 几何对称假设:车辆关于纵轴线对称,质心位于几何中心线上。
- 小角度假设:俯仰角 较小,满足 。
- 解耦假设:忽略侧倾运动的影响,假设车身仅发生垂向和俯仰运动。
3.2 微分方程组建立
定义下标 代表前轴front, 代表后轴rear。如下图所示,1/2车辆悬架4DOF动力学模型的自由度包括:车身垂向位移 、车身俯仰角 、前轮垂向位移 、后轮垂向位移 。
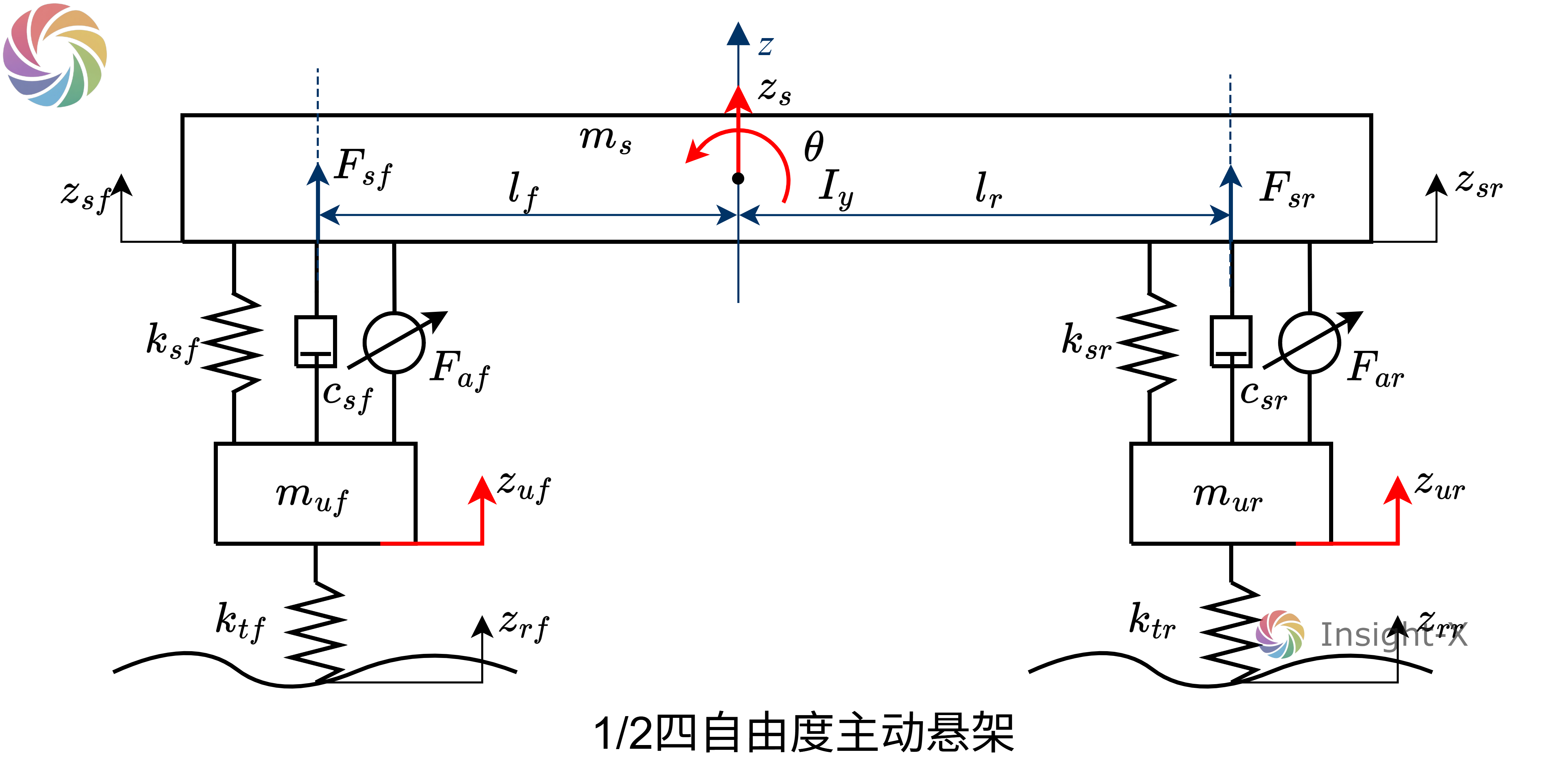
(A)车身沿 轴的垂向运动:
其中,为整车簧载质量;为簧载质量质心处垂向位移;分别为前、后悬架对车身的作用力,并且规定向上为正。
(B)车身绕 轴的俯仰运动:
其中,为整车俯仰转动惯量;为车身俯仰角;分别为质心到前轴、后轴的水平距离 。此外,力矩方向规定需与坐标系一致,此处假定前轴受向上力产生负力矩/点头,后轴受向上力产生正力矩/抬头。
(C)前后车轮(非簧载质量)垂向运动:
其中,分别为前后非簧载质量;为前后轮胎垂直刚度;为前后轮处的路面输入。
关键几何转化(车身质心到悬架硬点):基于小角度假设,前后悬架上端点的垂向位移 与车身状态的关系为:
悬架力通式: 悬架力由弹性力、阻尼力及主动控制力组成:
其中,为前后悬架等效刚度;为前后悬架等效阻尼;为前后悬架主动执行器输出力。
3.3 状态空间方程推导
选取状态向量 (8维),包含位移及其导数:
控制输入向量 (主动控制力):
路面干扰输入向量 :
系统状态空间方程形式为 。
推导示例(以 和 为例): 将悬架力公式代入动力学方程并展开:
通过整理各项系数,即可构建出完整的系统矩阵 、输入矩阵 及干扰矩阵 。
note that: 一些文献会把该模型的俯仰和簧载质量垂向位移变换到前后悬架与车身接触点的垂向位移上。
四、整车7自由度悬架动力学模型
整车7DOF悬架动力学模型完整描述了车身的垂向、俯仰、侧倾及四个车轮的垂向跳动,是开发高阶底盘控制算法(如解耦控制、CDC全车控制)的标准模型。
4.1 建模假设
- 坐标系定义:采用ISO 8855坐标系,X轴向前,Y轴向左,Z轴向上。
- 小角度线性化:假设俯仰角 和侧倾角 均为微小量。
- 悬架独立性:四个车轮独立悬挂,忽略非簧载质量之间的机械耦合(除非通过防倾杆显式建模)。
- 刚体与质心:车身刚体质心位置不变,忽略燃油消耗等导致的质量分布时变。
4.2 微分方程组建立
首先定义 分别代表前左、前右、后左、后右,根据下图可以分别建立整车悬架7DOF动力学模型,模型自由度包括:车身垂向位移、车身俯仰运动、车身侧倾运动、四个非簧载质量的垂向位移。
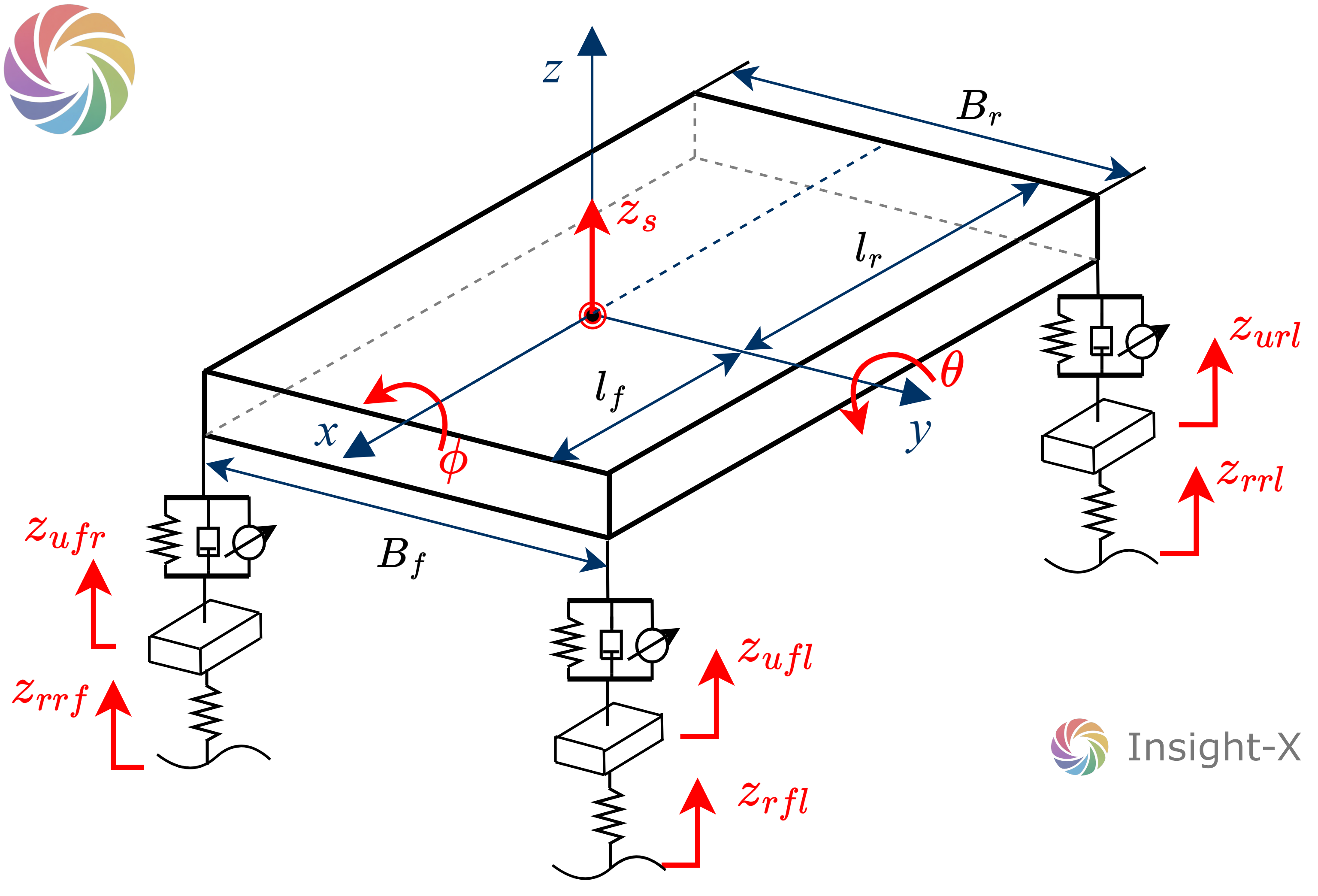
(A)车身沿 轴的垂向运动:
其中,为簧载质量,为车身垂向位移,表示车身四端点所受悬架垂向力。
(B)车身绕 轴的俯仰运动:
其中,为俯仰转动惯量,为车身俯仰角,分别为质心到前轴、后轴距离;注意力臂方向导致力矩正负,车头受向上力产生正俯仰力矩,该力矩使车头抬起。
(C)车身绕 轴的侧倾运动:
其中:为车身侧倾角,为前后轮距。
(D)四个车轮垂向运动:
关键几何转化(车身到悬架硬点):
悬架上端点位移 与车身状态关系:
悬架力:
4.3 状态空间方程推导
状态向量 (14维):
控制向量 (包含4个路面输入和4个主动控制力):
干扰输入:
方程形式 极为庞大,此处展示结构逻辑:
- 利用几何关系将 展开为状态变量 及其导数的线性组合。
- 代入悬架力 的表达式。
- 代入动力学微分方程,整理得到状态变量一阶导数的表达式,构建矩阵 和 。
附录:模型变量定义表
表1:1/4 二自由度悬架模型变量对照表
| 物理量名称 | 符号 | 物理意义 | 单位 |
|---|---|---|---|
| 簧载质量 | 1/4 车辆的车身质量 | kg | |
| 非簧载质量 | 车轮、制动器及部分悬架连杆质量 | kg | |
| 悬架刚度 | 弹性元件的等效线性刚度 | N/m | |
| 悬架阻尼系数 | 减振器的等效线性阻尼系数 | N·s/m | |
| 轮胎垂向刚度 | 轮胎径向压缩刚度 | N/m | |
| 簧载质量位移 | 车身绝对垂向位移 | m | |
| 非簧载质量位移 | 车轮中心绝对垂向位移 | m | |
| 路面激励 | 路面轮廓高度输入 | m | |
| 主动/半主动控制力 | 执行器产生的附加力 | N |
表2:1/2 四自由度悬架模型变量对照表
| 物理量名称 | 符号 | 物理意义 | 单位 |
|---|---|---|---|
| 侧倾转动惯量 | 车身绕纵轴(X轴)的转动惯量 | kg·m² | |
| 车身侧倾角 | 车身相对于水平面的侧倾角度 | rad | |
| 轮距 | 左右车轮中心接地点的横向距离 | m | |
| 侧倾刚度 | 悬架及防倾杆提供的总侧倾角刚度 | N·m/rad |
表3:整车 7 自由度悬架模型变量对照表
| 物理量名称 | 符号 | 物理意义 | 单位 |
|---|---|---|---|
| 俯仰转动惯量 | 车身绕横轴(Y轴)的转动惯量 | kg·m² | |
| 车身俯仰角 | 车身相对于水平面的俯仰角度 | rad | |
| 质心前距 | 质心到前轴的纵向水平距离 | m | |
| 质心后距 | 质心到后轴的纵向水平距离 | m | |
| 前轮距/后轮距 | 前轴/后轴的轮距 | m |