轮胎:合纵连横
前言
车轮的相关物理、几何内容在此处讨论。
一、几何计算
如下图所示,在考察、计算轮胎的纵侧向滑移时,常涉及到汽车内的三种速度,分别为:
- 整车质心处纵侧向速度,记为
- 整车在轮心处的纵侧向速度,记为
- 车轮坐标系下的车轮纵侧向速度,记为 (此图中为负值)
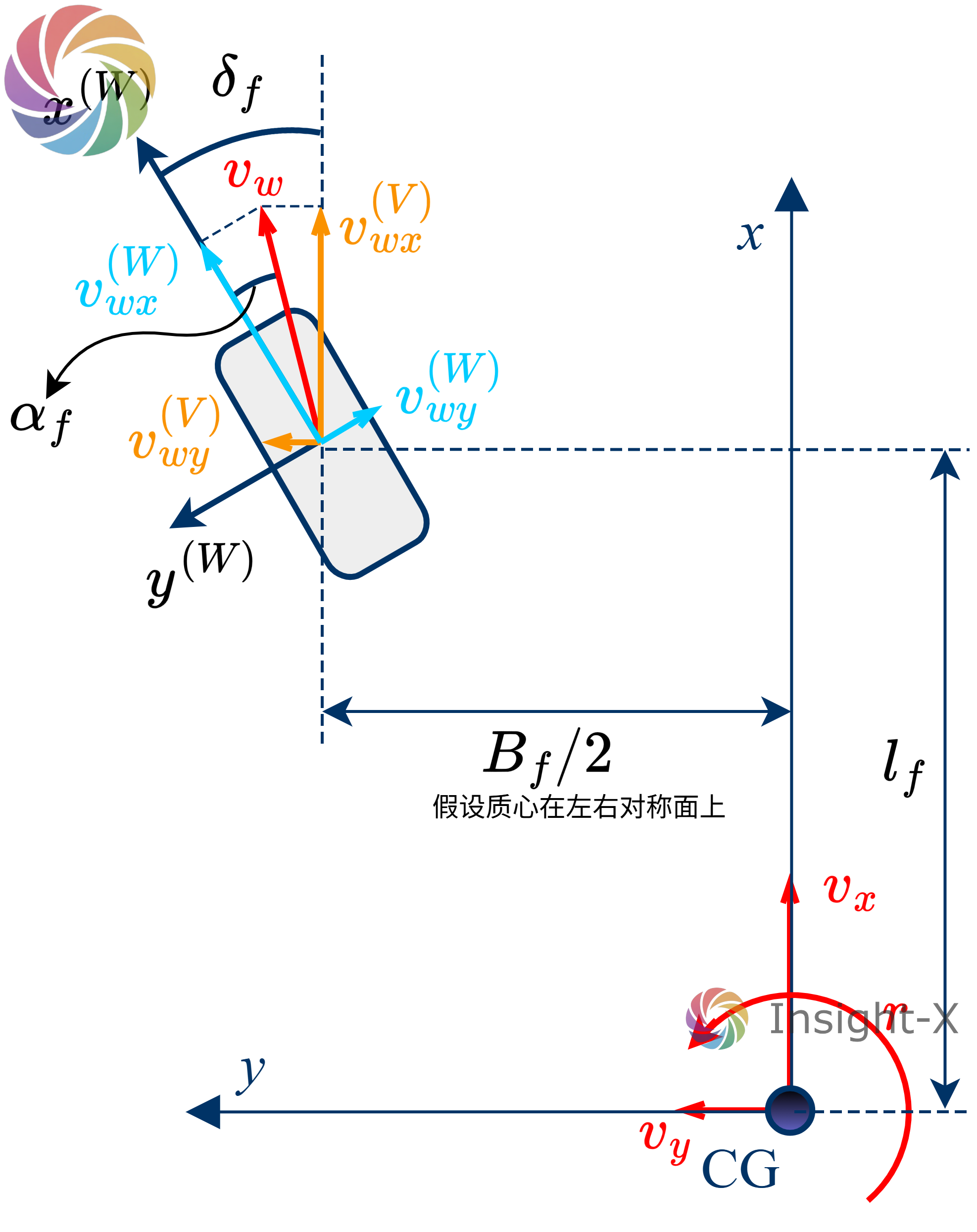
以左前轮为例,这三种速度的关系,可以根据刚体几何运动学等知识得到:
明确这一点,将能够清晰地推导出轮胎的侧偏角以及滑移率的计算公式。
1.轮胎侧偏角
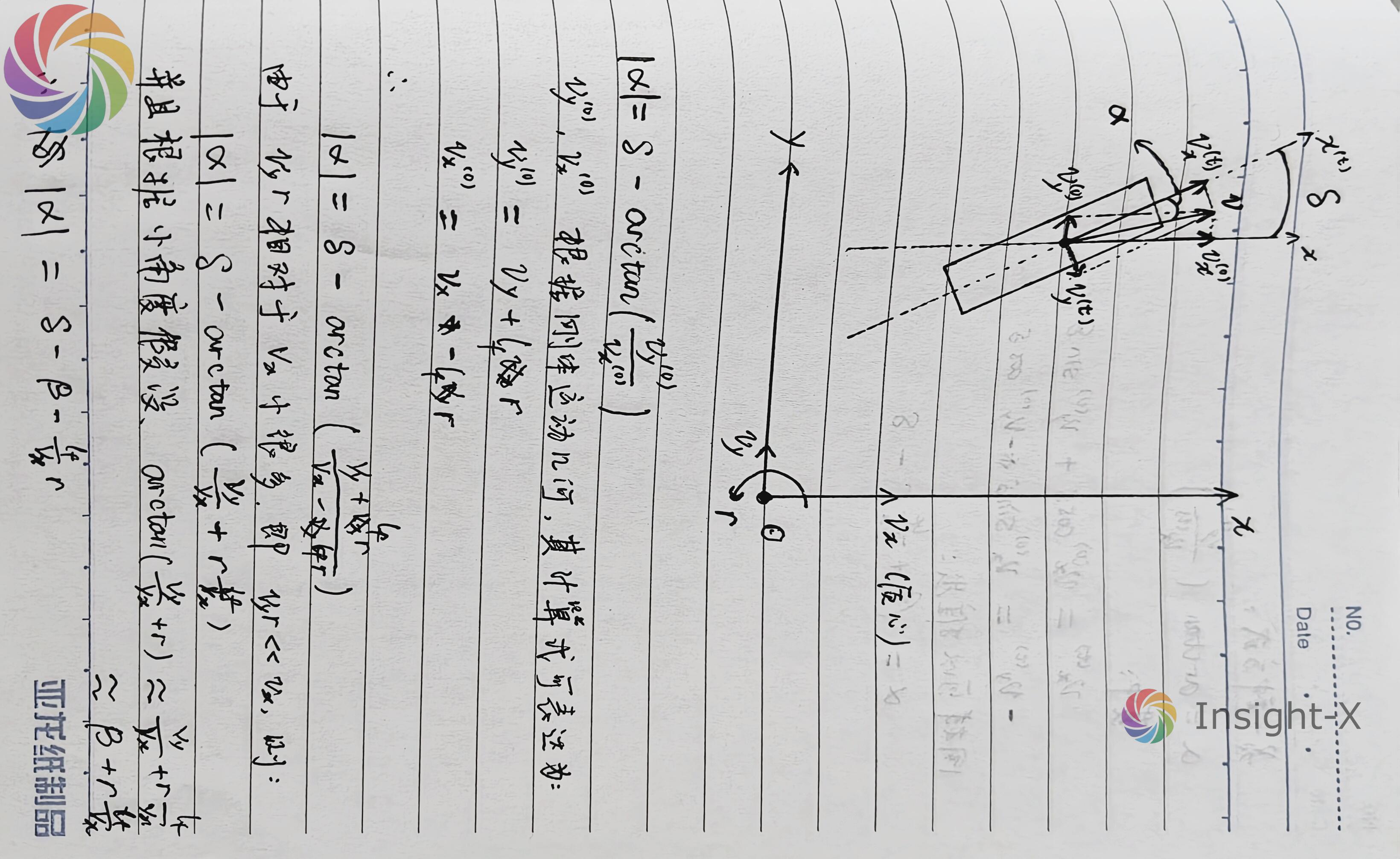
轮胎侧偏角是轮胎接地印记中心的位移方向与x轴夹角方向所形成的角度,根据此定义,结合上图,可以得到轮胎侧偏角的定义:
基于该定义式,结合前文所述的车轮坐标系与整车坐标系的不同轮心速度的关系,可以得到轮胎侧偏角的第一种计算方法:
注意到,上式中 相对较大,在车轮转角较小时更趋近于1,而则相对较小,因此可以近似地把看作二阶无穷小量而忽略掉,因此上式可以简化为:
并且同样地,由于相对较大,所以上式中的项相对较小,使用近似,则上式可写为:
此时,如果假设车轮转角较小,则可以简化三角函数值 ,并且注意到,一般纵向车速,并且,则上式可以进一步简化:
该式即为一般线性二自由度车辆动力学模型中线性轮胎中常用的轮胎侧偏角计算公式。其基本假设为小值假设:车轮转角较小,侧向车速、横摆角速度相对纵向车速较小。
综上所述,轮胎侧偏角有两种计算思路:
- 完全计算,基于车辆状态,包括纵侧向车速、横摆角速度,计算整车在轮心处的纵侧向车速,其次根据几何关系与车轮转角计算轮胎坐标系下的轮胎纵侧向速度,最后计算反正切角。
- 简化计算,使用车轮转角、整车质心侧偏角、纵向车速、横摆角速度,基于简化计算式,直接计算侧偏角。
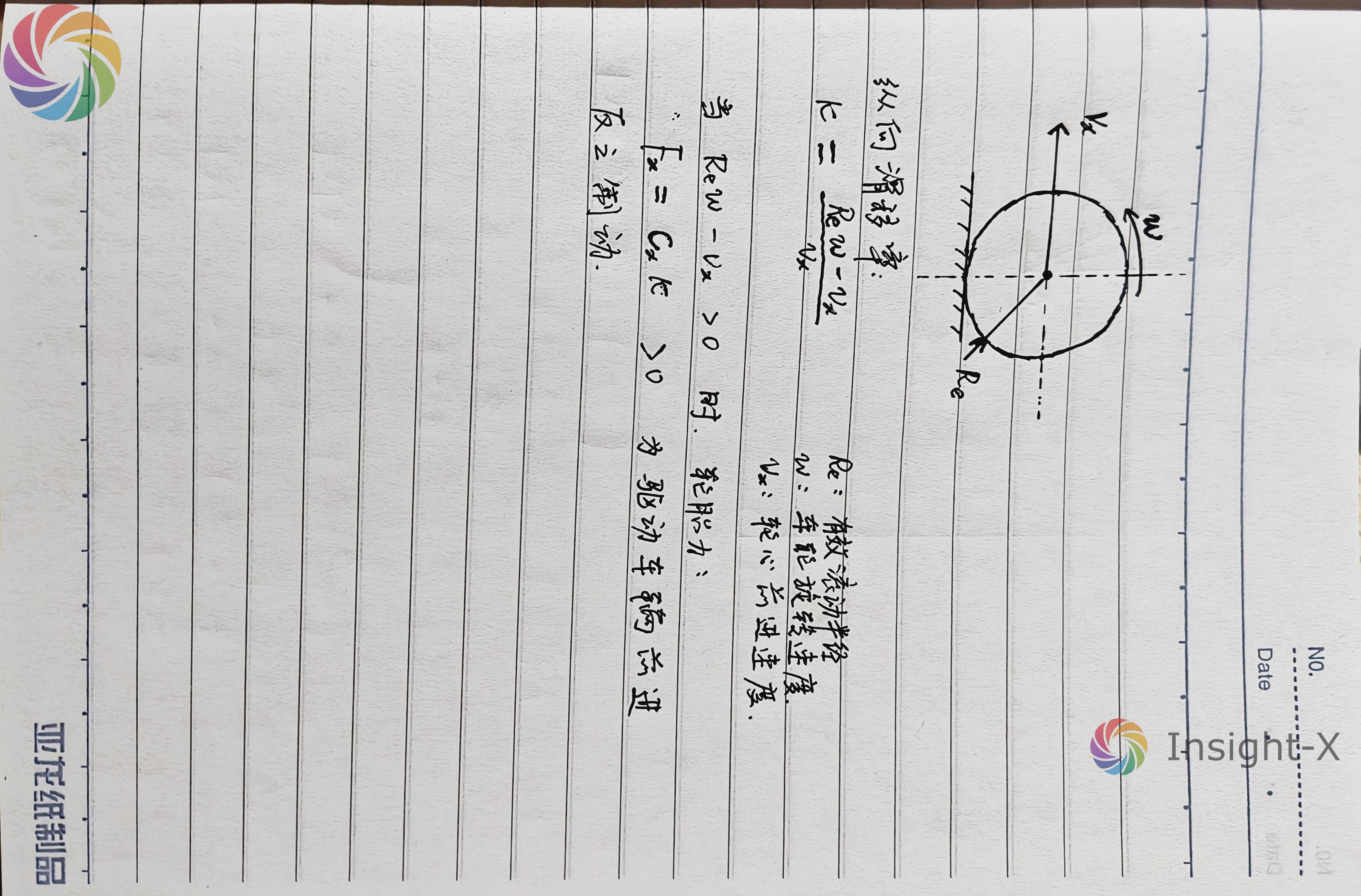
2.车轮滑移率
制动时纵向滑动率的定义式为:
其中, 为车轮有效滚动半径,为车轮旋转角速度。