制动系统概述
一、前言
汽车制动系统的作用就是阻碍车辆与惯性坐标系之间的相对运动。它是影响行驶安全性的关键部件,没有制动系统,车辆将难以应对突变的驾驶环境,并且无法在坡道上正常驻车或安全行驶。本文将首先介绍制动系统的核心功能;其次介绍制动系统的发展历程,以及其中各种制动系统;再次,从基本结构出发对比各种传统的制动系统;最后对比介绍两种线控制动系统的基本结构与特点。
二、制动系统概述
2.1 什么是制动系统
从车辆动力学角度界定,制动系统的本质是能量转换与耗散装置,其核心功能在于通过施加不可逆的阻力,改变车辆在惯性坐标系下的运动状态。
具体而言,该系统需满足行车制动与驻车制动两大工况的力学需求:
①在行车制动工况下,制动系统利用摩擦副产生的摩擦力矩(或电机产生的负扭矩),迫使车辆克服平动动能,产生与行驶方向相反的纵向加速度,从而实现可控减速或停车;此过程伴随着剧烈的能量转化,即车辆动能转化为热能耗散至大气中,或通过再生制动转化为电能储存。
②在驻车制动工况下,系统需提供足够的静态制动力矩,以克服车辆在坡道上的重力沿坡分量(),确保车辆在非平坦路面保持静止状态。制动效能的稳定性、热衰退抗性以及制动力的合理分配,直接决定了车辆的纵向操纵稳定性与主动安全性。
总而言之,汽车的制动系统是阻碍汽车加速运动的系统,其主要功能要求有如下三点:
- 行驶制动。在汽车于水平路面行驶过程中,降低车速并保证车辆的侧向稳定性,并且要求制动系统在必要时使车辆在预定的短距离内停车。
- 长时间制动。在车辆下坡过程中,维持车辆速度稳定。
- 驻车制动。在车辆不运动时,使车辆维持静止状态(相对静止)。
能够满足上述功能的,就可以被定义为广义的制动系统,它常常通过向车轮施加阻力,降低车轮转速,使轮胎产生纵向滑移,进而使路面产生与车辆行驶方向相反的作用力,从而达到降低车速的目的。
2.2 发展历程与分类
汽车制动系统的演进逻辑始终围绕着“增益系数提升”与“控制精度优化”两条主线展开。结合下图,可以大致了解汽车制动系统的简要发展历程。
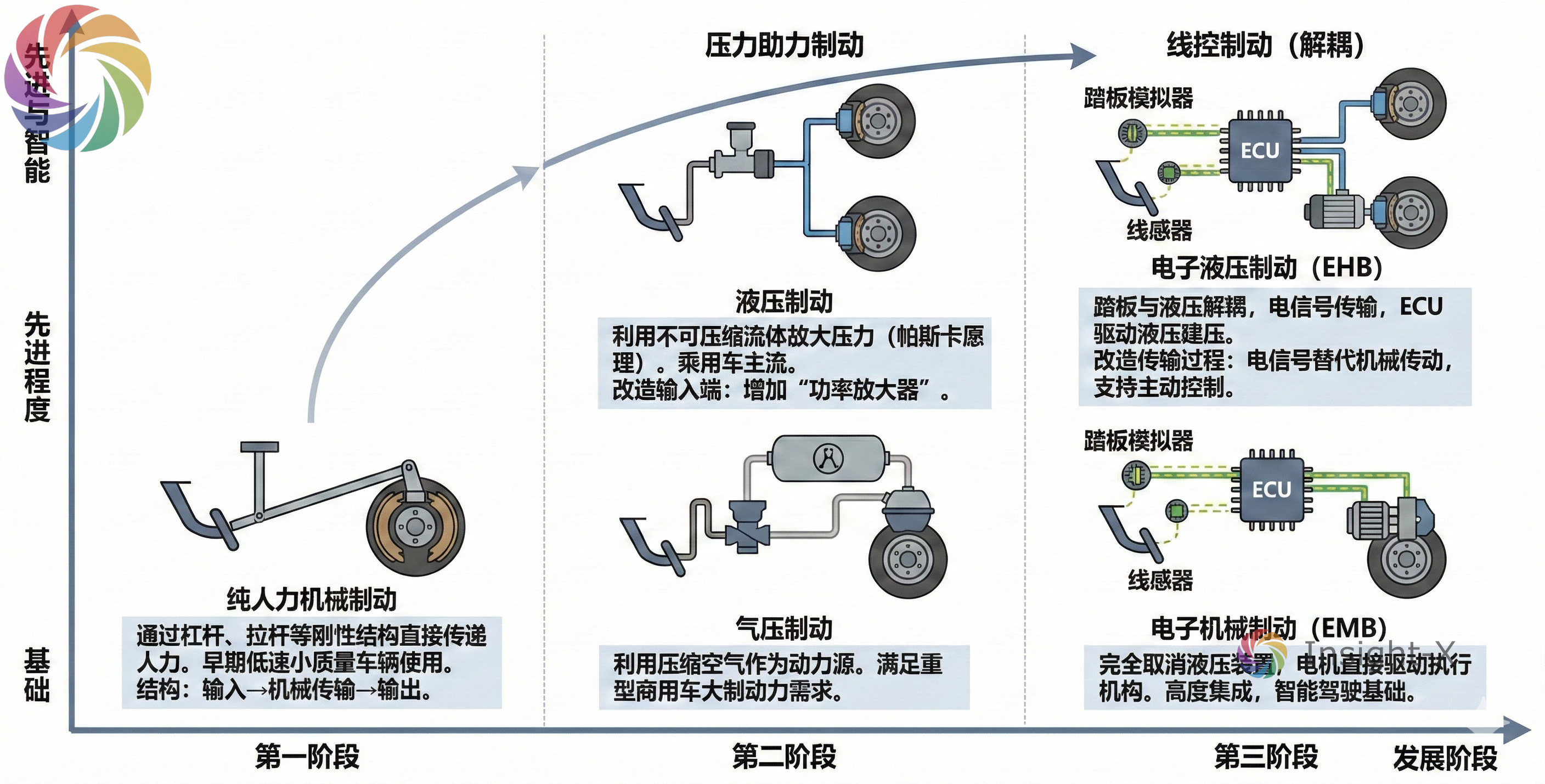
早期汽车得益于低车速、小质量的特点,尚可采用机械制动系统,通过杠杆、拉杆或线缆等刚性机械结构直接传递驾驶员踏板力。
然而,随着车辆动力性与整备质量的提升,单纯依赖人力驱动的机械制动在传动效率与制动力矩输出上遭遇瓶颈。20世纪20年代,基于帕斯卡原理的液压制动系统问世,液压制动利用不可压缩流体实现制动力的均等分配与压力放大,迅速成为乘用车主流。与此同时,针对重型商用车对大制动力的需求,研究人员设计了一种利用压缩空气作为动力源的气压制动系统。
目前(260103),线控制动已成为发展主流。线控制动不仅是高效能、集成化的现代底盘设计,也是智能驾驶演化的重要基础。与线控转向系统相似,其特点在于实现了制动踏板与液压执行机构的物理“解耦”。在基本结构上,线控制动系统通常由踏板模拟器、传感器组(位移/压力/转角)、电子控制单元及电液/机械执行机构组成。驾驶员踩下踏板时,传感器采集踏板意图信号发送至ECU,同时踏板模拟器提供力感反馈;ECU结合车辆动力学状态与智能驾驶系统的请求,计算目标液压力,并驱动高动态电机推动活塞或泵体快速建压。
因此,制动系统的发展可以分为三个阶段5种类型。第一阶段为早期纯人力制动;第二阶段为压力助力制动,根据压力源,可分为液压制动、压缩空气制动两种制动系统;第三阶段是线控制动,根据执行机构中是否存在液压传动装置,可分为电子液压制动、电子机械制动。这与转向系统的几个发展阶段较为相似。
此外,无论是传统的纯人力机械制动还是线控制动,它们的组成结构均可分为制动输入、传输、制动动力输出三个部分。以第一阶段作为基础,则在第二阶段,研究人员改造了输入端,设计了液压或压缩空气装置,它们相当于功率放大器,将驾驶员输入的制动踏板力进行放大,降低了驾驶员的输入负担;第三阶段,研究人员主要对传输过程进行改造,取消了原有的机械传动,改用电信号与ECU结合的中转方案,以此提供了更加灵活的系统控制设计,支持个性化制动设计、主动制动控制、集成化制动方案等等。
三、传统制动系统结构特性与性能对比
传统制动系统依据传力介质与执行机构的差异,呈现出显著的性能分化。表1对比了液压、气压与机械制动系统的关键技术指标。
表1 传统制动系统核心参数与特性对比
| 维度 | 液压制动系统 (Hydraulic) | 气压制动系统 (Pneumatic) | 机械制动系统 (Mechanical) |
|---|---|---|---|
| 执行机构 | 制动主缸、轮缸(卡钳/分泵) | 空气压缩机、制动气室、继动阀 | 杠杆、拉索、凸轮机构 |
| 传力介质 | 专用制动液(不可压缩流体) | 压缩空气(可压缩流体) | 刚性金属构件 |
| 系统刚度与响应 | 刚度高,压力建立时间短(通常)[2] | 刚度低,受气体压缩性及管路长度影响,响应较慢(甚至更长) | 刚度取决于连杆形变,响应即时但力值受限 |
| 力放大倍数 | 较高(取决于主/轮缸面积比及助力器增益) | 极高(主要取决于气室膜片面积与气压) | 低(仅依赖杠杆比) |
| 适用场景 | 乘用车、轻型卡车(总质量<3.5t) | 重型卡车、大型客车、挂车 | 驻车制动(手刹)、微型车辆 |
四、线控制动系统
如前所述,线控制动系统主要可分为电子液压制动(Electro-Hydraulic Brake, EHB) 与电子机械制动(Electro-Mechanical Brake, EMB),它们的主要区别在于是否以液压传动为主要传力装置。
4.1 电子液压制动系统
电子液压制动系统是传统液压制动向全线控技术过渡的关键形态,其本质上保留了成熟的液压传动链路,但实现了动力源的电控化革新。如下图所示,EHB系统主要由电子踏板单元、液压控制单元(HCU)及传统的液压执行末端(管路与卡钳)构成。
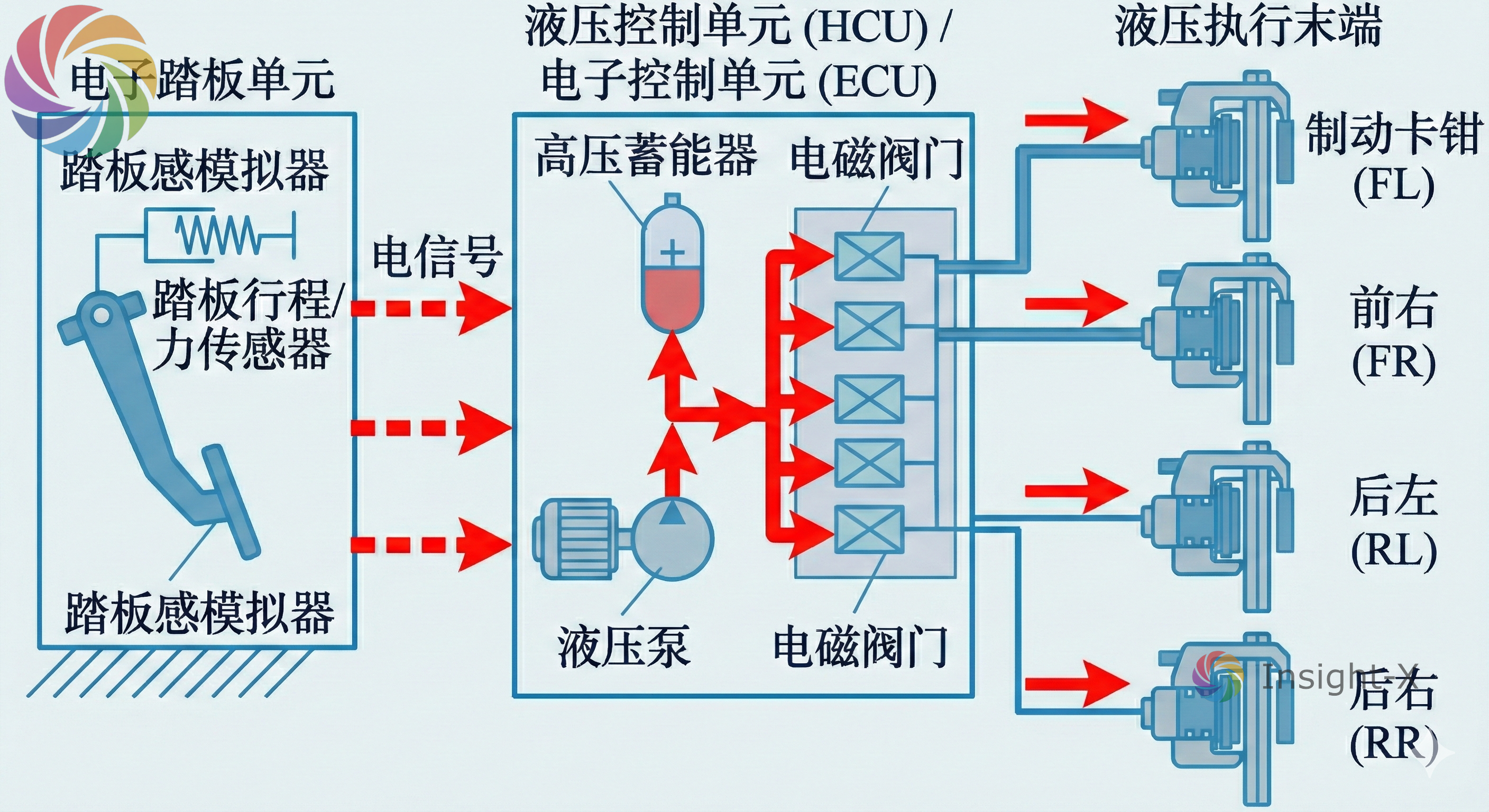
现代主流的“One-Box”集成式EHB方案将踏板模拟器、无刷电机、减速机构、主缸及ESP模块高度集成于单一箱体内。其核心工作原理基于“踏板解耦”与“主动建压”机制:驾驶员踩下制动踏板时,踏板模拟器提供反馈力感,同时位移传感器将驾驶意图转化为电信号传递至电子控制单元(ECU);ECU依据车辆动力学状态计算目标制动力,驱动高动态电机通过齿轮齿条或滚珠丝杠机构推动主缸活塞,建立液压并分配至四轮轮缸实施制动。
EHB系统的特点是保留了一套备用液压回路,当电子系统失效时,常开阀门自动复位,使得踏板能直接驱动主缸建立液压,确保基础的机械失效安全(Fail-Safe)能力。
4.2 电子机械制动系统
电子机械制动系统完全摒弃了制动液、主缸、真空泵及液压管路,如下图所示,其结构主要包括电子踏板模块、中央控制单元及安装于四个车轮的电子机械卡钳总成。每个轮端的执行机构高度集成了力矩电机、精密减速增扭机构(如行星齿轮减速器)以及运动转换机构(如滚珠丝杠或行星滚柱丝杠)。
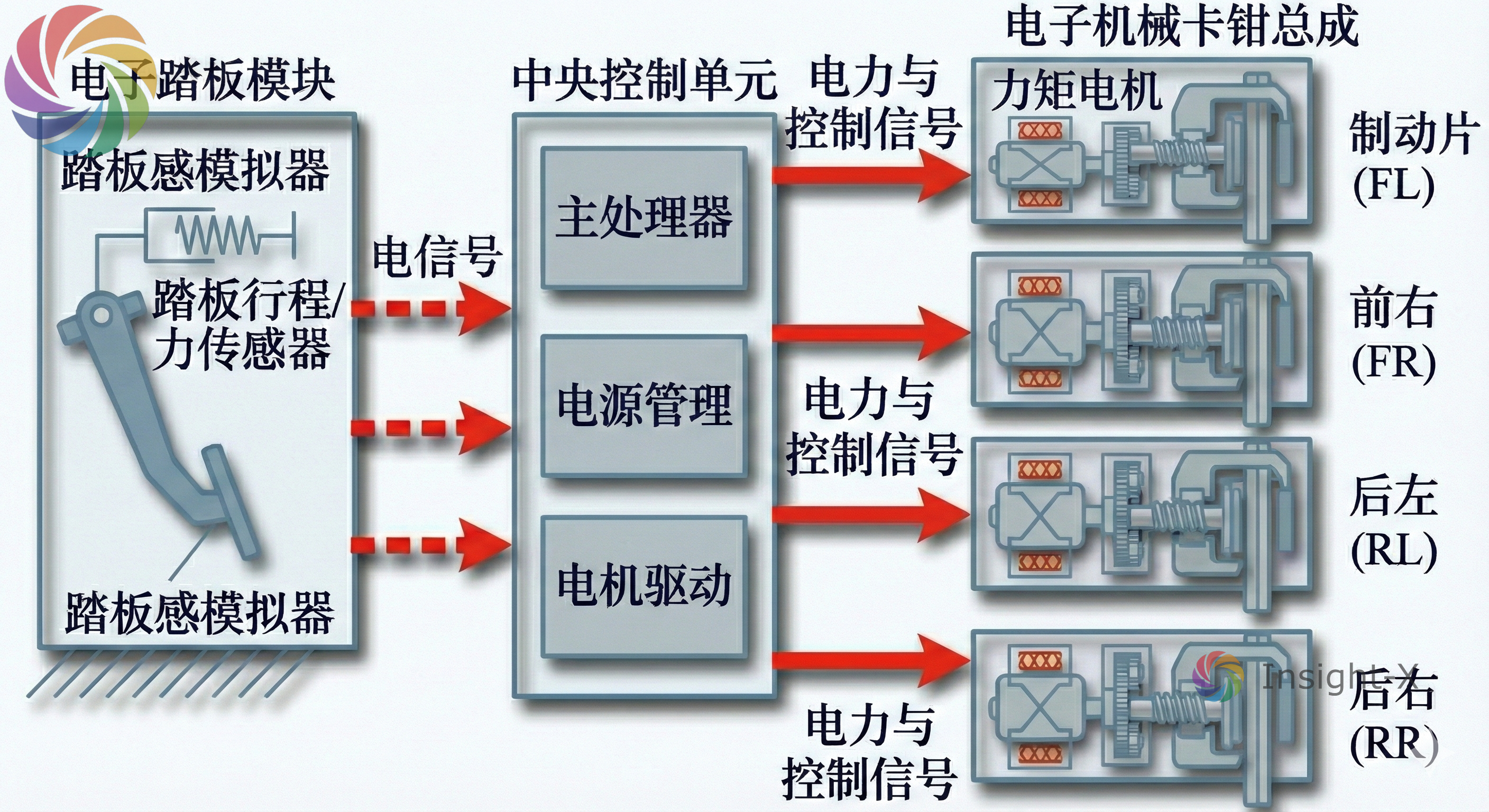
其工作原理是完全的电信号驱动:ECU接收制动请求后,直接向四个轮端电机发送控制指令;电机输出扭矩经减速增扭后,由丝杠机构将旋转运动转化为制动活塞的直线运动,直接夹紧制动盘产生摩擦力矩。EMB系统实现了能量传输的完全电气化,各轮端制动力均由独立的电机闭环控制,彻底消除了液压滞后现象。
4.3 系统特性对比分析
4.3.1 动态响应与控制精度
EMB 由于取消液压建压过程,避免了压力传输滞后,其制动响应时间可达几十毫秒量级,明显快于 EHB 约 150 ms 的建压时间(Time-to-Lock),对提升 AEB 制动性能具有重要意义。同时,EMB 支持真正的四轮独立控制,可实现高精度制动扭矩矢量分配,在控制灵活性与分辨率方面优于依赖液压调节的 EHB 系统。相比之下,EHB 借助液压介质在制动力平滑传递与微小调节方面更为成熟,且不存在电机齿槽转矩引起的力波动问题。
4.3.2 系统集成与布置灵活性
在整车架构层面,EMB 通过取消主缸、液压管路及传统 ESP 模块,显著提升系统集成度与布置自由度,简化装配流程,并更易适配滑板底盘与轮毂电机等模块化平台,同时避免制动液泄漏与维护问题。相比之下,EHB 即使采用 One-Box 架构,仍需复杂液压管路,且制动液维护增加了全生命周期成本。
4.3.3 安全冗余与工程挑战
尽管 EMB 在性能上具有潜在优势,但其工程化应用仍面临严峻挑战。EHB 具备液压物理备份,更易满足现行法规对失效安全的要求;而 EMB 断电即失去制动力,必须依赖多重电子电气冗余实现失效运行(Fail-Operational),相关法规尚未完全成熟。此外,轮端电机的高温与高振动环境、永磁体退磁风险以及对 48V 供电架构的高功率需求,均显著提高了 EMB 的工程实现难度。因此,EHB 仍是当前兼顾性能与可靠性的现实方案,而 EMB 代表需要进一步突破的长期发展方向。
4.3.4 对比总结
将EMB与EHB的核心差异总结为下表。
| 对比维度 | EMB(Electro-Mechanical Brake) | EHB(Electro-Hydraulic Brake) |
|---|---|---|
| 动态响应 | √无液压建压,响应达几十毫秒级 | 需液压建压,Time-to-Lock 约 150 ms |
| 控制能力 | √四轮完全独立控制,支持高精度制动扭矩矢量分配 | 受液压回路约束,独立性与分辨率较低 |
| 制动力平顺性 | 受电机齿槽转矩等影响,平顺性控制难度较高 | √液压传递连续,微小制动力调节成熟 |
| 系统集成 | √无主缸与液压管路,集成度高,利于滑板底盘 | One-Box 集成度提升,但仍需液压系统 |
| 维护与环保 | √无制动液,无泄漏与维护问题 | 需制动液维护与排气 |
| 功能安全 | 需多重电子电气冗余实现 Fail-Operational | √具备液压物理备份,法规成熟 |
| 工程挑战 | 高温振动、退磁风险大,需 48V 供电支持 | √工程成熟,可基于 12V 系统运行 |
| 产业定位 | 长期发展方向,工程化仍在推进 | 当前主流量产方案 |
4.4 线控制动系统的核心优点总结
- 高效的能量回收: 由于实现了踏板解耦,在制动初段,系统可以利用电机反拖进行再生制动,而踏板模拟器让驾驶员感觉不到液压制动未介入。这实现了协调式再生制动,相比传统叠加式再生制动,能显著提升电动车续航里程(约15%-20%)。
- 主动安全性能跃升: 极快的建压速度使得AEB自动紧急制动和ACC自适应巡航更加精准和及时。同时,在ABS触发时,由于液压回路与踏板隔离,驾驶员不会感觉到踏板的剧烈抖动,提升了驾驶信心。
- 高度集成化与轻量化: 现代线控制动(如Bosch IPB)将ESP、真空助力器、主缸集成在一个模块中,体积只有传统系统的1/3,重量显著降低,便于底盘布置。
- 支持自动驾驶冗余: 线控制动系统天然具备电子控制属性,易于通过双控单元、双绕组电机实现L3级以上自动驾驶所需的制动冗余。