线控转向系统数学模型
一、前言
线控转向系统的数学模型描述了该系统的行为规律,也就是系统输入、状态、输出之间的因果关系及其物理机制。
数学模型,其一可用于分析系统性能,包括稳定性、响应速度、频率特性等;其二可以用于仿真验证,使用计算机模拟实际工况并计算系统的响应,实现预开发从而降低成本;其三还可以用于设计控制器,基于模型的控制,如模型预测控制、滑模控制、线性二次型调节器等都需要基于模型进行控制器设计。数学模型作为通用语言,能够使机械、电控、软件等多个领域的工程师能够协同开发。
一般机械系统有运动学模型和动力学模型,前者从几何角度描述了被研究对象的运动,不涉及力与质量,后者则考虑引起运动的力与力矩,其描述了力或力矩引起物体运动状态变化的机理。
可以说,运动学模型是动力学模型的基础,但是本文并不打算从线控转向系统的运动学模型扩展出动力学模型。而是首先再次讨论线控转向系统的机械结构并进行必要的简化,其次基于简化系统,使用牛顿-欧拉法建立其动力学模型;最后在文末论述如何基于动力学模型推导出动力学模型,并且给出其逆运动学模型。
二、物理架构
线控转向系统主要由三部分组成:方向盘总成、电子控制单元ECU、转向执行总成。 方向盘总成主要由方向盘、转向管柱、路感电机、减速器等组成,其空间布置关系如下图所示。
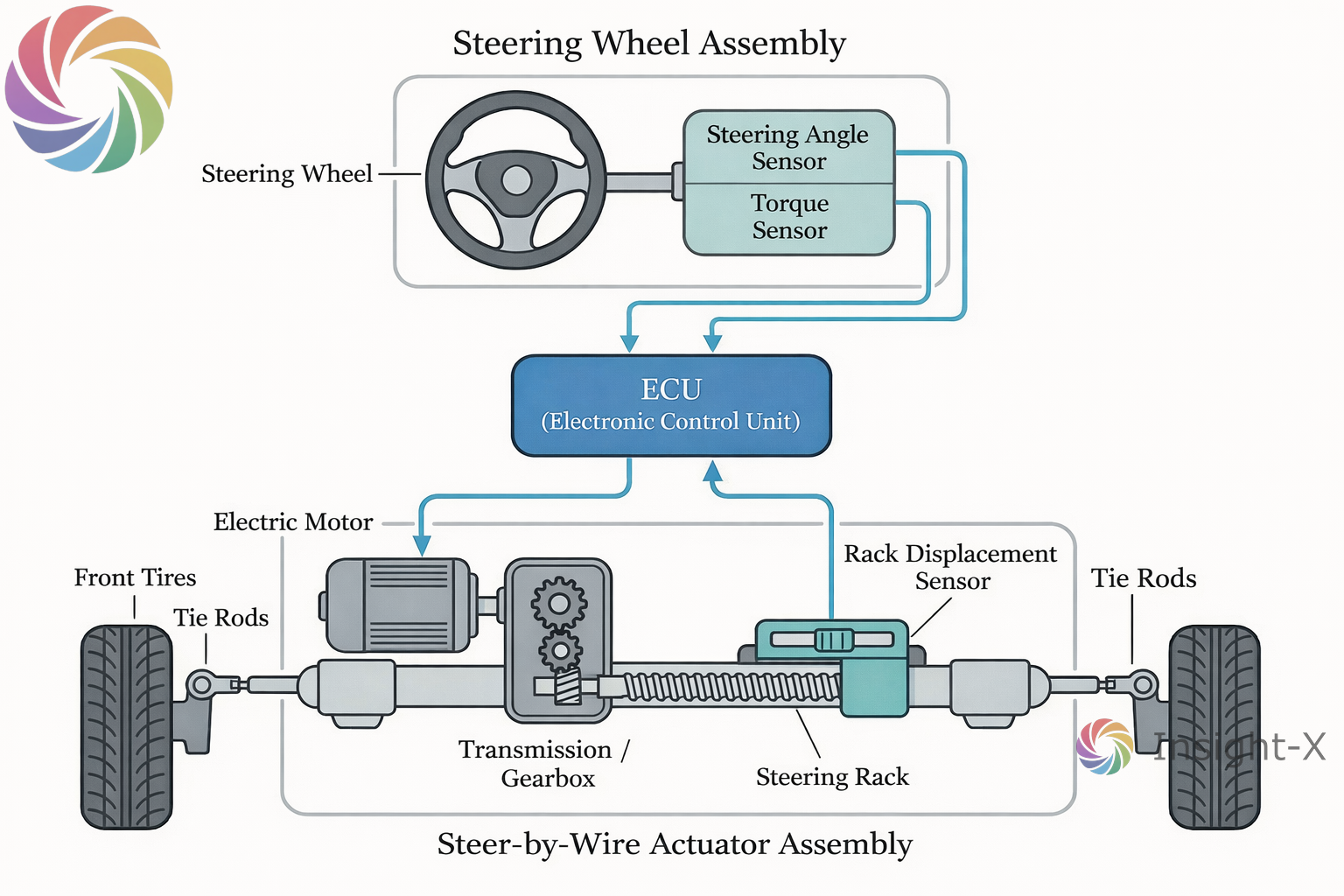
减速器一般为蜗轮蜗杆或行星齿轮。 电子控制单元通过线缆与外设进行信号交换,是实现线控的基础与关键。由于信号传递与信息处理一定时间,因此ECU可以建模为一定的时滞/延迟环节 Delay. 转向执行总成主要由转向电机、减速器、齿条、转向拉杆节臂等组成,轮胎不是狭义的转向系统的一部分,但是它是转向系统的作用对象,其侧偏力的生成与转向系统密切相关,因此在转向系统建模时通常会一并考虑。
因此,一般转向系统的动力学建模,主要考虑转向系统的方向盘总成、电子控制单元的动力传递链路。首先根据实际设计需求,对动力学系统做一定的简化,例如将刚性连接的部分视为一个整体;其次,根据动力传动链路,依次建立各质量体的动力学微分方程;最后整理微分方程得到最终的动力学模型。 此外,由于整车动力学控制一般计算最优的车轮转角,因此需要我们根据期望车辆转角计算出对应的期望电机转角,此时就需要使用到逆运动学模型,其实就是求电机转角与车轮转角之间的关系。根据转向梯形可以计算出车轮转角和齿条位移之间的关系(这是非线性的),根据减速器传动比可以计算出齿条位移与转向电机转角之间的关系,从而可以构建逆运动学模型,当然它是非线性的。在实际使用中,常见的非线性逆运动学模型可以通过表格、拟合公式等进行表示。
三、动力学建模
动力学系统所受力一般可以分为:驱动力、负载力、惯性力、阻尼力、摩擦力。本节将依照该受力分析思路,进行动力学建模。摩擦力模型
3.1.1 方向盘总成动力学建模
方向盘总成受力示意图如下所示:
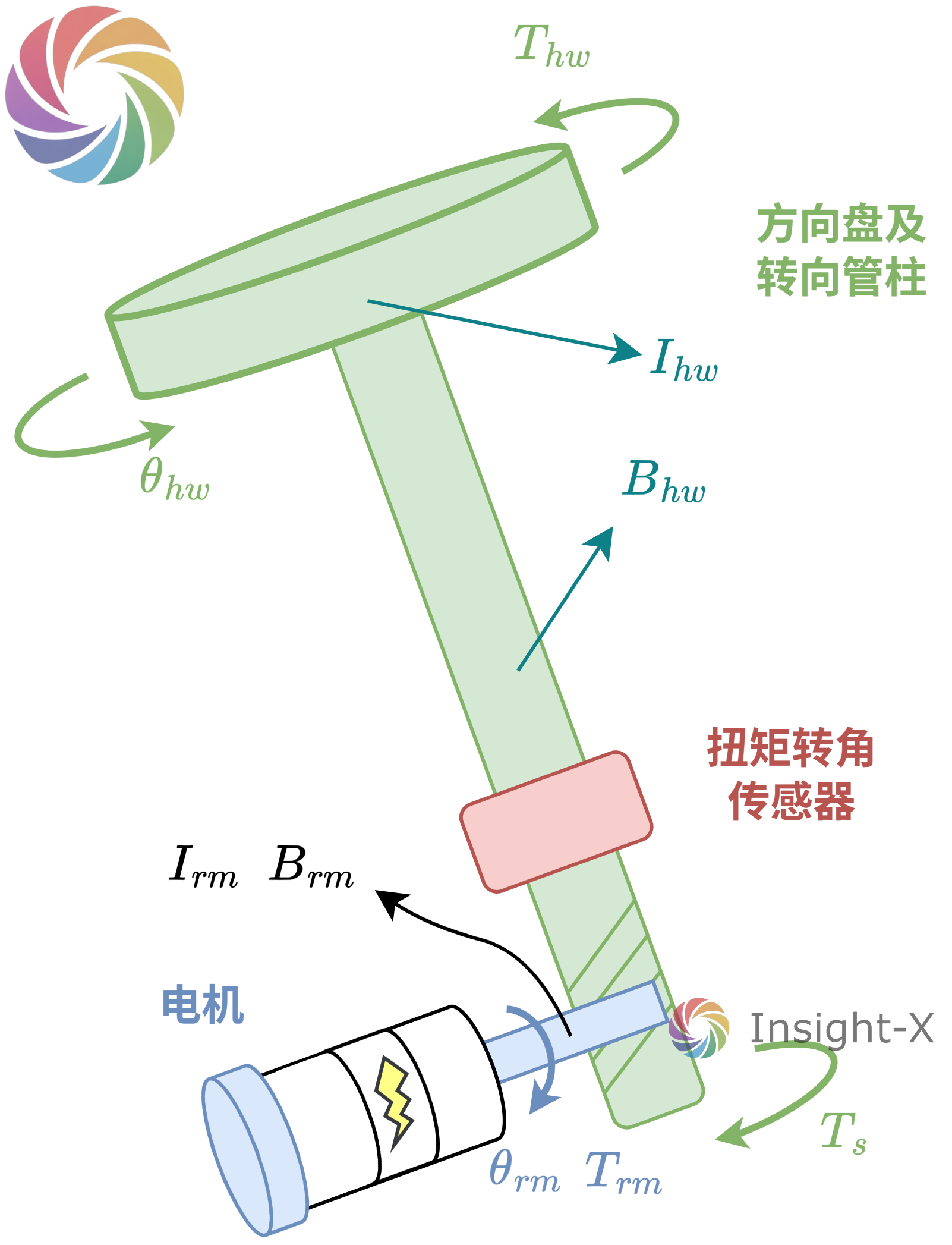
选取方向盘轴系转角 与路感电机转子转角 作为系统的广义坐标,方向盘轴系与路感电机之间的相对扭转通过减速器传动比进行等效映射。设减速器减速比为 ,则方向盘轴系在电机侧的等效转角为 。
首先,对方向盘及转向管柱组成的轴系进行受力分析,其动力学方程可表示为:
其中,、、 分别表示方向盘及转向管柱的等效转动惯量、粘性阻尼系数与摩擦力矩, 为驾驶员施加在方向盘上的转矩, 为轴系扭转弹性产生的内力矩。
考虑方向盘轴系与路感电机侧之间的等效扭转刚度 ,该内力矩可表示为:
其次,对路感电机转子进行动力学建模。路感电机输出轴在电磁转矩驱动下运动,同时承受来自方向盘轴系的反作用力矩,其动力学方程为:
其中,、、 分别为路感电机转子的转动惯量、阻尼系数与摩擦力矩, 为路感电机产生的电磁转矩。由减速器传动关系可知,方向盘轴系侧的扭转载荷在电机侧按减速比 进行等效变换,因此反作用力矩项为 。
将扭转内力矩表达式代入上述方程,可得到方向盘总成的完整动力学模型:
3.2 转向执行总成
转向执行总成包括转向电机、减速器、转向齿条、拉杆等。转向执行总成与方向盘总成的动力学模型大同小异,主要区别在于:转向齿条为直线运动,方向盘及转向管柱为旋转运动。
对于转向电机:
其中,分别为转向执行电机输出轴的转动惯量、阻尼系数、摩擦力,为其转角,为电磁驱动力矩,为滚珠丝杠减速器(或其他减速器)对电机输出轴作用力矩,其满足:
其中,为转向执行电机输出轴的扭转刚度,为该电机输出轴在减速器处的转角。假设减速器输入输出稳定,即:
对于转向齿条:在转向过程中,齿条受到电机通过滚珠丝杠副对其施加的驱动力,同时受到拉杆对其在水平直线运动方向上的阻力。因此:
其中,分别为转向齿条的质量、阻尼系数、摩擦力,为齿条位移,分别为拉杆对齿条的转向阻力在齿条位移方向上的分力,为减速器对齿条作用力,其满足:
其中,为转向执行总成的减速比。
整理上述公式可得:
结合上式,可得:
可以进一步整合: